
1ĪóŠwšō
▀@Ų¬╬─š┬╩ŪÖCąĄ▒█īŻÖ┌Ą─Ą┌ę╗Ų┌Ż¼įō╬─š┬ų╝į┌ī”ÖCąĄ▒█╗∙ĄAų¬ūR▀Mąą║åꬥ─Ė┼╩÷Ż¼×ķų«║¾ÖCąĄ▒█Ą─▀\äėīW║═äė┴”īWĘ┬šµū÷║├õüē|ĪŻįōŲ¬╬─š┬ų╗▀Mąąš¹¾wĄ─ų¬ūR╝▄śŗ╩ß└Ē║═Š▀¾wų¬ūRĄ─║åę¬ĮķĮBŻ¼▓ó▓╗Ģ■▀^ČÓ╔Ņ╚ļŻ¼Ųõųąā╚╚▌ų„ę¬üĒį┤┼cJohn J. Craig Ą─ų°├¹ų°ū„ĪČÖCŲ„╚╦īWī¦šōĪĘŻ¼šłąĶę¬īW┴ĢÖCąĄ▒█Ą─═¼īW¤o▒╚╩ņūxįōĢ°ĪŻ
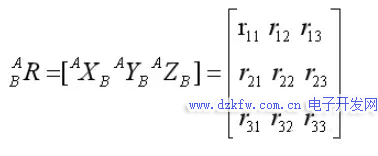
╩ūŽ╚ĮķĮBę╗Ž┬╬ęīóę¬ĮķĮBĄ─ų„ę¬ų¬ūR³cŻ¼┐šķg├Ķ╩÷┼c▐DōQĪóÖCąĄ▒█▀\äėīWĪóÖCąĄ▒█╦┘Č╚┼cņo┴”ĪŻ
×ķ╩▓├┤ę¬īW┴Ģ┐šķg├Ķ╩÷┼c▐DōQ─žŻ¼╬ęéā┐╔ęį┐┤Ž┬łDŻ¼ÖCąĄ▒█╩Ū╚¶Ė╔éĆŚU▀BĮėČ°ą╬│╔Ą─Ż©▀BĮėā╔éĆŚUĄ─ĄžĘĮ╩ŪĻP╣ØŻ®Ż¼Č°į┌ÖCąĄ▒█ųą▀@ą®ŚUĘQ×ķ▀BŚUŻ¼├┐éĆ▀BŚU┐╔ęįį┌Ę“▀BŚUŻ©╔Žę╗▀BŚUŻ®Ą─╗∙ĄA╔Ž└@─│ę╗▌Są²▐DŻ¼Ż©ĻP╣Ø═©▀^ļŖÖCą²▐DĦäė▀BŚUą²▐DŻ®Ż¼Č°▀@éĆ▌Sų╗┼cĘ“▀BŚUŽÓī”Į¹ų╣Ż¼▀@Š═ī¦ų┬ę╗Ą®ČÓéĆ▀BŚUČ╝▀Mąą▀\äėĢrŻ¼▀BŚUų╗─▄┼cĪ░╔Žę╗╝ē▀BŚUĪ▒║═Ī░Ž┬ę╗╝ē▀BŚUĪ▒▀Mąąų▒ĮėĄ─┐šķg▐DōQĻPŽĄŻ¼ę▓Š═╩Ūšf«ö╬ęų¬Ą└Ą┌ę╗éĆ▀BŚUą²▐DĄ─ĮŪČ╚ĢrŻ¼╬ęŠ═─▄Ė∙ō■Ąūū∙Ą─┐šķgū°ś╦═Ų╦Ń│÷Ą┌ę╗éĆ▀BŚUĄ─Š▀¾w╬╗ų├Ż¼╚╗║¾ę╗╝ēę╗╝ē═∙║¾═ŲŠ═─▄½@Ą├ūŅ─®Č╦ÖCąĄ▒█Ą─╬╗ų├Ż¼ę▓Š═╩ŪĮėąČ▒╚─®Č╦╬╗ų├ĪŻČ°┐šķg├Ķ╩÷║═▐DōQŠ═╩ŪīW┴Ģ╚ń║╬ę╗╝ēę╗╝ēėŗ╦Ń┐šķgū°ś╦Ż¼ę▓Š═╩ŪīW┴ĢÅ─╣╠Č©Ą─Ąūū∙ķ_╩╝Ż¼┐šķgĢr╚ń║╬═©▀^▀BŚUą²▐Dę╗▓Įę╗▓Į▐DōQĄ─ĪŻ

ÖCąĄ▒█▀\äėīWŠ═║▄║├└ĒĮŌ┴╦Ż¼├µī”ÖCąĄ▒█Ż¼╬ęéā┐ŽČ©╩Ū蹊┐╚ń║╬╩╣Ą├ÖCąĄ▒█░┤šš╬ęéāęŌįĖ╚ź▀\äėŻ¼╚ń║╬┐žųŲÖCąĄ▒█─®Č╦Ą─╬╗ų├ĪŻ▒╚╚ńė├ÖCąĄ▒█─├▒ŁūėŻ¼┐ŽŽ╚ę¬┐žųŲ─®Č╦ĄĮ▀_▒Łūė╬╗ų├Ż¼╦∙ęį▀@└’Š═įOėŗĄĮ▀\äėīWų¬ūRŻ¼Ęų×ķš²▀\äėīW║═─µ▀\äėīWŻ¼š²▀\äėīWŠ═╩Ūęčų¬├┐éĆĻP╣ØļŖÖCĄ─ą²▐DĮŪČ╚Ż¼═Ų╦Ń│÷─®Č╦╣żŠ▀Ą─┐šķg╬╗ū╦Ż©▀@└’Ą─╬╗ū╦ŲõīŹŠ═╩Ū┐šķg╬╗ų├╝ė╔Ž┐šķg│»Ž“Ż®ĪŻ─µ▀\äėīWŠ═╩Ūęčų¬╬ę─®Č╦┐šķg╬╗ų├Ż¼═Ų╦Ń│÷Ė„éĆĻP╣ØĄ─ĮŪČ╚Ż¼▀@Š═ŅÉ╦Ųė┌─├▒ŁūėŻ¼╬ęų¬Ą└▒Łūė╬╗ų├Ż¼ąĶę¬═Ų╦Ń│÷─®Č╦╣żŠ▀ĄĮ▀_įō╬╗ų├ąĶę¬├┐éĆĻP╣Øą²▐DČÓ┤¾ĮŪČ╚ĪŻ
ÖCąĄ▒█╦┘Č╚┼cņo┴”Ż¼Š═╔µ╝░ĄĮäė┴”īWų¬ūRŻ¼╩ūŽ╚īW┴ĢÖCąĄ▒█╦┘Č╚Ż¼╩Ū×ķ┴╦├Ķ╩÷├┐éĆ▀BŚUŠĆ╦┘Č╚║═ĮŪ╦┘Č╚╩Ū╚ń║╬é„▀fĄ─Ż¼Ųõųą▒╚▌^ų„ꬥ─ų¬ūR³cŠ═╩Ūč┼┐╔▒╚ŠžĻćŻ¼įōŠžĻć├Ķ╩÷┴╦├┐éĆĻP╣Ø╦┘Č╚┼c─®Č╦Ą─╬╗ū╦╦┘Č╚ĪŻČ°ÖCąĄ▒█ņo┴”Š═╔µ╝░ĄĮÖCąĄ▒█äė┴”īWų¬ūRŻ¼ų„ę¬ųvĄ─╩ŪÖCąĄ▒█į┌─│éĆū╦æBĖ„ĻP╣Øęį╦┘Č╚Īó╝ė╦┘Č╚▀\äėĢrŻ¼ĻP╣ØļŖÖCąĶę¬▌ö│÷Ą─┴”ŠžŻ¼╚ń╣¹─®Č╦ī”═ŌĮń╩®╝ė┴”Ż¼▀@└’▀ĆąĶę¬╝ė╚ļ╩®╝ė┴”Ę┤ū„ė├į┌Ė„éĆĻP╣ØĄ─┴”ŠžĪŻ
2Īó┐šķg╬╗ų├Īóū╦æB┼c╬╗ū╦Ą─├Ķ╩÷
2.1Ż¼╬╗ų├▒Ē╩Š
«ö╬ęéāī”ÖCąĄ▒█Į©┴óū°ś╦ŽĄĢrŻ¼═∙═∙īóĄūū∙ū„×ķ╗∙£╩ū°ś╦ŽĄŻ¼łDųąū°ś╦ŽĄA▒Ń╩Ū╗∙£╩ū°ś╦ŽĄŻ¼Š═─▄ė├ę╗éĆ3\times1Ą─╬╗ų├╩Ė┴┐Įo│÷ū°ś╦ŽĄųąĄ─╚╬║╬³cČ©╬╗ĪŻ▀Ćę¬ūóęŌ╩Ė┴┐Č©┴xį┌──ę╗éĆū°ś╦ŽĄĪŻ^AP╩ŪųĖŽÓī”ū°ś╦ŽĄAĄ─ę╗éĆ³cĄ─╬╗ų├ĪŻ

╩└Įńū°ś╦ŽĄųąĄ─╚╬║╬³cČ╝┐╔ęįė├ę╗éĆ3Ī┴1Ą─╬╗ų├╩Ė┴┐▀MąąČ©╬╗Ż¼└²╚ńŻ║
2.2Īó╬╗ū╦▒Ē╩Š
▓╗āHąĶę¬▒Ē╩Š┐šķgųąĄ─³cĄ─╬╗╬╗ų├Ż¼▀ĆąĶę¬├Ķ╩÷╬’¾wĄ─ū╦æBŻ¼ę▓Š═╩Ūįō³c│÷╬’¾wĄ─ĘĮŽ“ĪŻ╔ŽłD┤_Č©┴╦▓┘ū„▒█─®Č╦╬╗ų├Ż¼╚¶ū╦æBę▓┤_Č©Ż¼─®Č╦Ą─╬╗ū╦Š═─▄═Ļ╚½▒╗┤_Č©Ž┬üĒĪŻ×ķ┴╦├Ķ╩÷╬’¾wĄ─ū╦æBŻ¼╬ęéāį┌╬’¾w╔Ž╣╠Č©ę╗éĆū°ś╦ŽĄ▓óŪęĮo│÷┤╦ū°ś╦ŽĄŽÓī”ė┌ģó┐╝ū°ś╦ŽĄĄ─├Ķ╩÷ĪŻ╚ńŽ┬łDĄ─ģó┐╝ŽĄB╝┤×ķ╣╠Č©į┌╬’¾w╔ŽĄ─ĪŻ
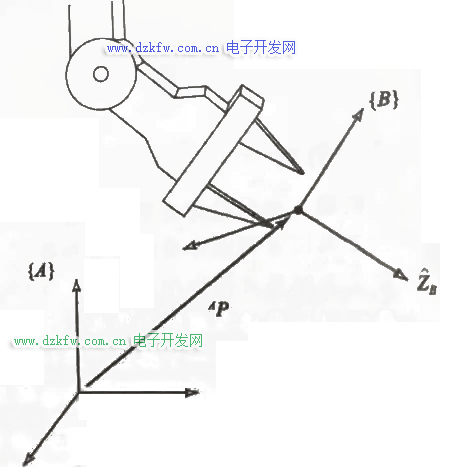
ė├XB,YB,ZBüĒ▒Ē╩Šū°ś╦ŽĄ{B}Ė„ų„▌SĘĮŽ“Ą─å╬╬╗╩Ė┴┐Ż¼«öė├ū°ś╦ŽĄ{A}üĒ▒Ē╩ŠĢrŻ¼╦³éā▒╗īæ│╔AXB,AYB,AZBŻ¼īó╚²éĆå╬╬╗╩Ė┴┐░┤AXB,AYB,AZBĒśą“┼┼┴ąĮM│╔ę╗éĆ3Ī┴3Ą─ŠžĻćŻ¼ĘQų«×ķą²▐DŠžĻćŻ¼ė├Ę¹╠¢ABRüĒ▒Ē╩ŠĪŻ
ėą┴╦╬╗ū╦Ą─├Ķ╩÷Ż¼╬ęéāŠ═─▄ų¬Ą└ę╗éĆ▀BŚU─®Č╦ę▓Š═╩ŪĻP╣ØŽÓī”ė┌╔Žę╗ĻP╣ØĄ─╬╗ū╦Ż¼ę└┤╬├Ķ╩÷ūŅ║¾Š═─▄½@Ą├─®Č╦╬╗ū╦ĪŻ╚ńłD╦∙╩ŠŻ¼╝t╔½▒Ē╩Š▀BŚUŻ¼░ū╔½▒Ē╩ŠĻP╣Ø╠ÄŻ¼├┐éĆĻP╣Ø╠ÄŠ═┤·▒Ēę╗éĆū°ś╦ŽĄŻ¼═©▀^ū°ś╦ŽĄĄ─▀f═Ųėŗ╦ŃŻ¼Š═─▄╦Ń│÷─®Č╦ū°ś╦ŽĄŽÓī”╗∙£╩ū°ś╦ŽĄĄ─╬╗ū╦ĪŻ
ĮėŽ┬üĒŠ═Ģr╚ń║╬ėŗ╦Ńū°ś╦ŽĄĄ─╬╗ū╦ĪŻ
2.3 ū°ś╦ŽĄŲĮęŲ
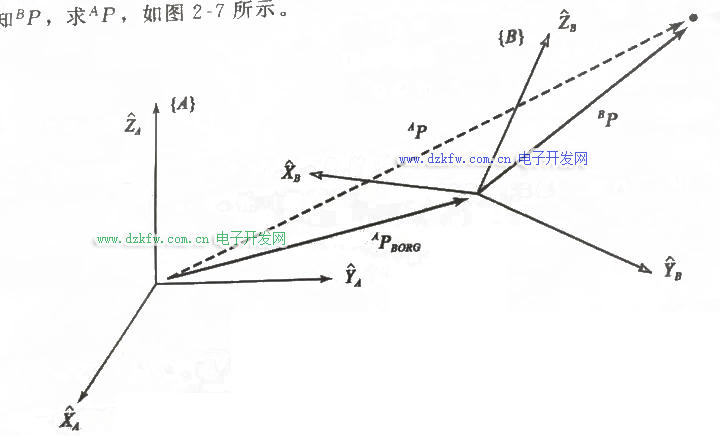
┐╔ęįÅ─łDųą┐┤│÷Ż¼Bū°ś╦ŽĄŠ═╩ŪŽÓī”Aū°ś╦ŽĄ▀MąąŲĮęŲ
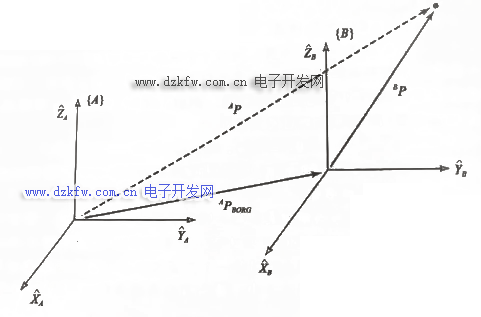
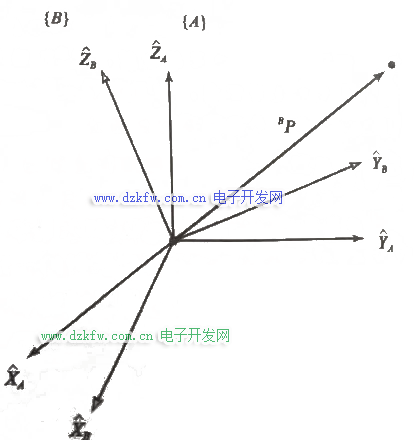
┤╦ĢrŻ¼╬ęéāė├╩Ė┴┐ŽÓ╝ėĄ─▐kĘ©Ū¾³cPŽÓī”ė┌AĄ─▒Ē╩Š^APŻ║
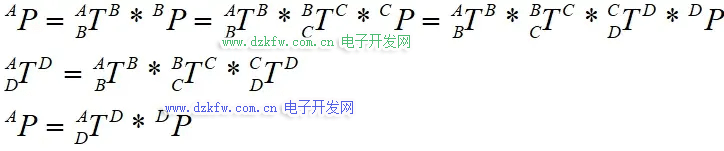
2.4 ū°ś╦ŽĄą²▐D
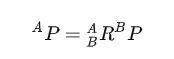
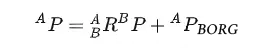
╚¶╬ęéāęčų¬╩Ė┴┐ŽÓī”ė┌BĄ─Č©┴x^BPŻ¼¼Fį┌ŽļŪ¾╩Ė┴┐ŽÓī”ė┌AĄ─Č©┴xŻ¼Ūęā╔éĆū°ś╦ŽĄįŁ³cųž║ŽŻ¼╬ęéāęčų¬^A_BRŻ¼─Ū├┤╬ęéā╩Ū┐╔ęįŪ¾ĮŌĄ─ĪŻ
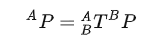
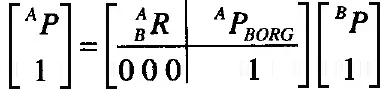
įō╩Į┐╔║å╗»×ķą²▐DŠžĻćą╬╩Į▒Ē╩ŠŻ║
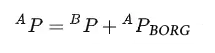
ėą┴╦Šžū°ś╦ŽĄĄ─Ų½ęŲ║═ą²▐DŻ¼╬ęéāŠ═┐╔ęįĖ∙ō■╗∙£╩ū°ś╦ŽĄ═Ų╦Ń│÷▀BĮė▀BŚUĄ─ū°ś╦ŽĄĪŻ
╚ńłD╦∙╩Š×ķā╔éĆū°ś╦ŽĄėąŽÓī”Ą─Ų½ęŲ║═ą²▐DŻ¼ė┌╩ŪŠ═ėąŻ║
Č°▀@śė▒Ē╩Šā╔éĆū°ś╦ŽĄĄ─ĻPŽĄŠ═’@Ą├║▄┬ķ¤®Ż¼ė┌╩Ū═©▀^Č©┴x▐DōQ╦ŃūėüĒĘĮ▒Ń├Ķ╩÷Ż║
ė┌╩Ū╬ęéāŠ═┐╔ęį═©▀^▐DōQ╦ŃūėüĒ├Ķ╩÷ā╔éĆū°ś╦ŽĄĄ─ĻPŽĄŻ¼═¼śė▐DōQ╦Ńūė╩Ū┐╔ęį»B╝ėĄ─Ż¼═©▀^▓╗öÓĄ─»B╝ėŠ═┐╔ęį╦Ń│÷─®Č╦┼c╗∙£╩ū°ś╦ŽĄĄ─▐DōQ╦ŃūėŻ¼ę▓Š═╩ŪĄ├ĄĮ─®Č╦ŽÓī”ė┌╗∙£╩ū°ś╦ŽĄĄ─╬╗ū╦ĪŻ
3 ĪóÖCąĄ▒█▀\äėīW
3.1Īó▀BŚU▒Ē╩Š
╩ūŽ╚īW┴ĢÖCąĄ▒█▀\äėīWŻ¼Š═ąĶę¬┴╦ĮŌÖCąĄ▒█Ą─ĮYśŗŻ¼▀BŚU┼c▀BŚUų«ķgĄ─ū°ś╦ŽĄ╩Ū╚ń║╬ūāōQĄ─Ż¼╩Ū╚ń║╬ŲĮęŲŻ¼╚ń║╬ą²▐DŻ¼╩╣Ą├─│ę╗▀BŚUū°ś╦ŽĄ░┤šš▀@éĆŲĮęŲą²▐Dų«║¾─▄ē“½@Ą├Ž┬ę╗éĆ▀BŚUĄ─ū°ś╦ŽĄŻ¼ę▓╝┤╩Ūā╔éĆ▀BŚUų«ķgĄ─ū°ś╦ŽĄ╦Ńūė┼c▀BŚUĮYśŗĄ─ĻPŽĄŻ¼Ė³ų▒░ūĄ─ęŌ╦╝Š═╩ŪŻ¼╚ń╣¹ų¬Ą└─│ę╗ĻP╣ØĄ─ĮŪČ╚Ż¼Š═─▄šęĄĮĻP╣Ø▀BĮėĄ─ā╔éĆ▀BŚUū°ś╦ŽĄī”ė┌Ą─ūāōQ╦ŃūėTĪŻ
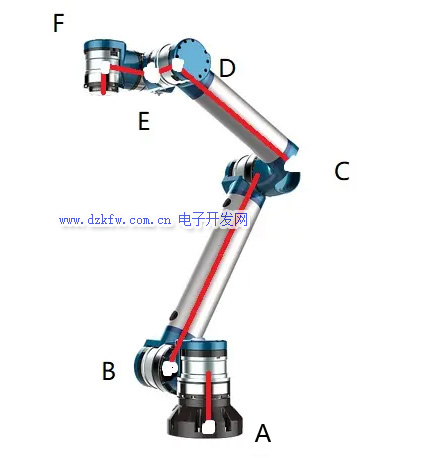
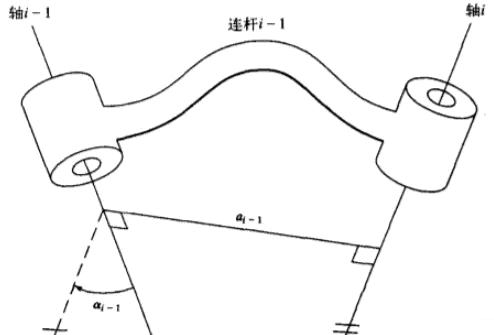
│ŻęŖĄ─▓┘ū„▒█Ą─ĮYśŗę╗░Ńā׎╚▀xō±ų╗ėąę╗éĆūįė╔Č╚Ą─ĻP╣Øū„×ķ▀BŚUĄ─▀BĮėĘĮ╩ĮŻ¼┤¾▓┐ĘųĄ─▓┘ū„▒█ųąĢ■░³└©▐DäėĻP╣Ø║═ęŲäėĻP╣ØĪŻų╗ėą║▄╔┘ęŖĄ─ŪķørŻ¼Ģ■╩╣ė├Š▀ėąnéĆūįė╔Č╚Ą─ĻP╣ØŻ¼▀@ĘNĻP╣Øę▓┐╔ęį│ķŽ¾Ą─┐┤ū÷ė├néĆå╬ūįė╔Č╚Ą─ĻP╣Ø┼cn-1éĆķLČ╚Ą─▀BŚUĮM║ŽČ°│╔Ą─ĪŻ
╬ęéāį┌ėæšō▓┘ū„▒█ĢrŻ¼Ģ■Å─╣╠Č©╗∙ū∙ķ_╩╝×ķ▀BŚUŠÄ╠¢Ż¼╬ęéā┴ĢæTąįĄž│╔╣╠Č©╗∙ū∙×ķ▀BŚU0Ż¼ĮėŽ┬üĒĄ─Ą┌ę╗éĆ─▄äėĄ─▀BŚU▒╗ĘQ×ķ▀BŚU1Ż¼ęį┤╦ŅÉ═ŲŻ¼ūŅ─®Č╦Ą─Ą─▀BŚUŠ═ĘQ×ķ▀BŚUn
╔ŽłDŠ═╩Ūę╗ĘN▀BŚU├Ķ╩÷ĘĮ╩ĮŻ¼ė├╦─éĆģóöĄ├Ķ╩÷ā╔éĆ▀BŚUĄ─ŽÓī”╬╗ū╦ĻPŽĄŻ║
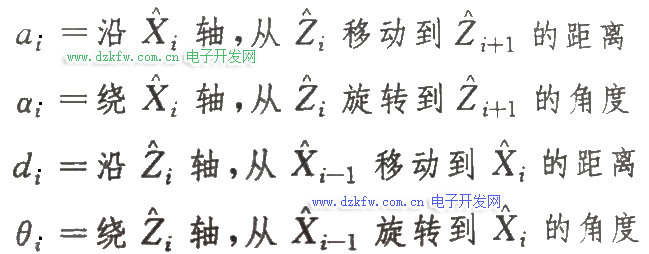
ę▓Š═╩Ū╚ń╔ŽĘų╬÷Ż¼ų¬Ą└ā╔éĆ▀BŚUĄ─Š▀¾wŽÓī”╬╗ū╦ĻPŽĄ║¾Ż¼Š═─▄═Ų╦Ń│÷ā╔éĆ▀BŚUū°ś╦ŽĄĄ─▐DōQ╦ŃūėTŻ║
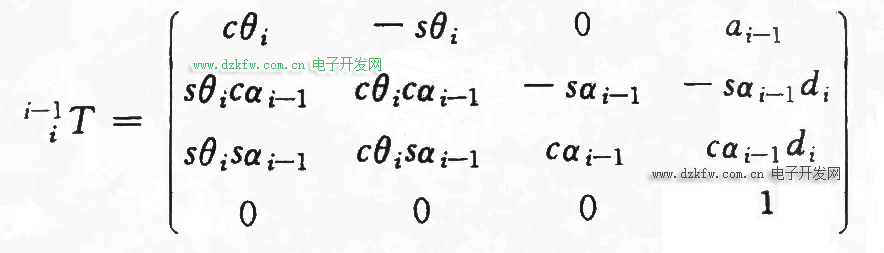
▀@śėŻ¼ų╗ę¬╬ęų¬Ą└├┐éĆ▀BŚUŽÓī”ĻPŽĄŻ¼Š═─▄═Ų╦Ń│÷ÖCąĄ▒█─®Č╦ŽÓī”╗∙£╩ū°ś╦Ą─▐DōQ╦ŃūėŻ¼ę▓Š═╩Ū─▄ē“Ą├ĄĮ─®Č╦ŽÓī”╗∙£╩ū°ś╦ŽĄĄ─╬╗ų├║═ĀŅæBĪŻ
3.2Īó▀\äėīWįŁ└Ē
į┌▀@éĆ▀BŚUĻPŽĄųąŻ¼ėąę╗éĆģóöĄ”╚Ż¼╦¹╩ŪäėæBūā╗»Ą─Ż¼Š═╩ŪŲõ╦¹╚²éĆģóöĄ╩Ū▓╗Ģ■ūā╗»Ż¼Č°įōģóöĄ”╚Š═╩ŪĻP╣Øą²▐DĮŪČ╚Ż¼╦∙ęį╬ęéāŠ═─▄Ė∙ō■├┐éĆĻP╣Øą²▐DĮŪČ╚═Ų╦Ń│÷ÖCąĄ▒█─®Č╦ŽÓī”╗∙£╩ū°ś╦ŽĄĄ─ūāōQ╦ŃūėŻ¼Å─Č°Ą├ĄĮÖCąĄ▒█─®Č╦Ą─╬╗ū╦Ż¼▀@Š═╩Ūš²▀\äėīWĪŻ
«ö╬ęéāų¬Ą└─®Č╦╬╗ū╦ĢrŻ¼ŽŻ═¹ÖCąĄ▒█─▄▀_ĄĮįō╬╗ų├Ż¼Š═╩ūŽ╚═Ų╦Ń╠ÄįōūāōQ╦ŃūėĻPė┌”╚Ą─╣½╩ĮŻ║
╚╗║¾ėąęčų¬Ą─╗∙£╩ū°ś╦ŽĄ╬╗ū╦║═─®Č╦╬╗ū╦▀MąąŠžĻć▀\╦ŃĄ─Š▀¾wģóöĄ TŻ¼╚╗║¾▀MąąĘĮ│╠Ū¾ĮŌŻ¼Ą½╩Ū─µ▀\äėīWĄ─Ū¾ĮŌļyČ╚Ģ■ļSų°ÖCąĄ▒█ĻP╣ØöĄ┴┐Ą─ūāōQ│╔Äū║╬▒Čį÷ĪŻ
┤¾Ė┼Ą─▀\äėīWų¬ūR³cŠ═ųvĮŌĄĮ▀@└’Ż¼ėąĻPäė┴”īWų¬ūRĢ■į┌ų«║¾äė┴”īWĘ┬šµ▓┐ĘųųvĮŌŻ¼Č°ĮėŽ┬üĒīóĢ■░l▓╝▀\äėīWĄ─Ė„ĘNĘ┬šµĘĮĘ©ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū