
“Ľ°ĘÜĖÓ}/ńŅėň(bi®°o)
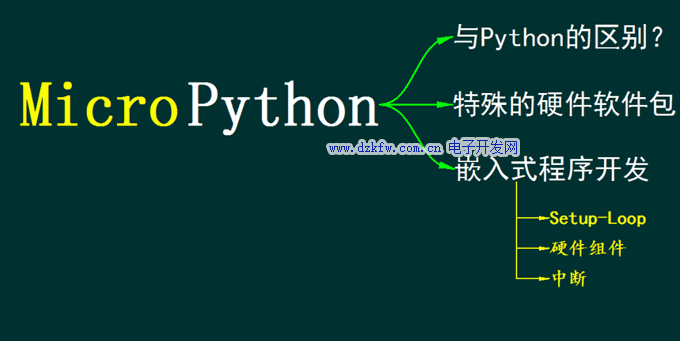
«į√śő“āÉĆW(xu®¶)Ńē(x®™)Ńň Python’Z—‘£¨ ť_įl(f®°)üoĺÄŽä‹Č÷«ń‹‹áń£ Ļ”√Ķń « MicroPython ’Z—‘£¨»ÁļőŹń Python ’Z—‘ĺé≥Ő£¨ řD(zhu®£n)ŌÚ MicroPython ’Z—‘ĺé≥Ő£¨Ō¬√ś◊Ćő“āÉĀŪ’Ą?w®ī)Ą“‘Ō¬»żāÄ(g®®)ÜĖÓ}£ļ £®1£©ňŻāÉ÷ģťgĶńÖ^(q®Ī)Ąe£Ľ£®2£© MicroPython÷–Őō ‚Ķń”≤ľĢť_įl(f®°)‹õľĢįŁ£Ľ£®3£©‘ŕ MicroPython ť_įl(f®°)Üő∆¨ôC(j®©)÷–«∂»Ž Ĺ≥Ő–ÚĶń»żāÄ(g®®)–Ť“™◊Ę“‚ĶĹĶńŐōŁc(di®£n)£¨Setup-Loop ’ŻůwŅÚľ‹ĹY(ji®¶)ėč(g®įu)£Ľ”≤ľĢŌŗÍP(gu®°n)‹õľĢĹY(ji®¶)ėč(g®įu)£Ľ”≤ľĢ÷–ĒŗĶń Ļ”√°£Ō¬√ś◊Ćő“āÉ÷ū“Ľ”Ď’ď“ĽŌ¬°£
∂Ģ°ĘĽýĪĺ‘≠ņŪ
1°ĘŇcPython÷ģťgĶń≤Óģź
- Introduction to MicroPython ®C Python for Microcontrollers
MicroPython ’Z—‘ «ľĮ≥…Ńň Python ’Z—‘Ķń“ĽāÄ(g®®)∑÷÷ߣ¨ Ćć(sh®™)¨F(xi®§n)Ńň Python 3.4 įśĪĺ’Z—‘ėň(bi®°o)ú (zh®≥n)°£ňŁ «Ć£ťTěť‘ŕÜő∆¨ôC(j®©)Ŗ@Óź«∂»Ž ĹőĘŅō÷∆∆ų…Ō£¨ Ćć(sh®™)¨F(xi®§n)Ķń“ĽŅÓļÜ(ji®£n)Ěć∑Ä(w®ßn)∂®ĶńPython’Z—‘Ĺ‚ŠĆ∆ų”…”ŕňŁĆŔ”ŕłŖľČ(j®™)Ĺ‚ŠĆ–Õ’Z—‘£¨ ĻĶ√Üő∆¨ôC(j®©)Ķńť_įl(f®°)◊ÉĶ√»›“◊∆ūĀŪ¨F(xi®§n)‘ŕ“—Ĺõ(j®©ng)”–Īä∂ŗĶńÜő∆¨ôC(j®©)∆ĹŇ_(t®Ęi)∂ľ÷ß≥÷ MicroPython ŖM(j®¨n)––Ď™(y®©ng)”√‹õľĢĶńť_įl(f®°)°£Ć¶(du®¨)”ŕ≥űĆW(xu®¶)’ŖĀŪ÷v£¨ ‘ŕ’Z∑®Ć”√ś£¨ MicroPython Ňc Python ’Z—‘Ķń≤ÓĄeĽýĪĺ…Ō≤Ľ“◊ĪĽ”X≤ž°£ Ŗ@ņÔĺÕ≤Ľ◊Ų’Ļť_£¨ īůľ“»ÁĻŻł–Ňd»§£¨Ņ…“‘‘ŕ MicroPython ĻŔĺW(w®£ng)ŖM(j®¨n)––≤ťŅī°£ ◊Óļů–Ť“™’f√ų“ĽŁc(di®£n)Ķń «£¨ ěťŃňĪ„”ŕ‹õľĢť_įl(f®°)£¨ ‘ŕMicroPython÷–”–“Ľ∑NĹĽĽ• Ĺ≥Ő–Úť_įl(f®°)ń£ Ĺ£¨ REPL£¨ “≤ĺÕ « Read Evaluate Print Loop°£MicroPython ‘ŕīňń£ ĹŌ¬£¨ ≤ĽĒŗ◊x»°ŹńīģŅŕ›Ē»ŽĶń MicroPython ÷łŃÓ£¨ ąŐ(zh®™)––ļů£¨ ŖM(j®¨n)––ĹY(ji®¶)ĻŻ›Ē≥Ų°£Ŗ@āÄ(g®®)Ŗ^≥Ő≤ĽĒŗ—≠≠h(hu®Ęn)£¨ –ő≥…“ĽāÄ(g®®)ĹĽĽ• Ĺť_įl(f®°)ń£ Ĺ°£
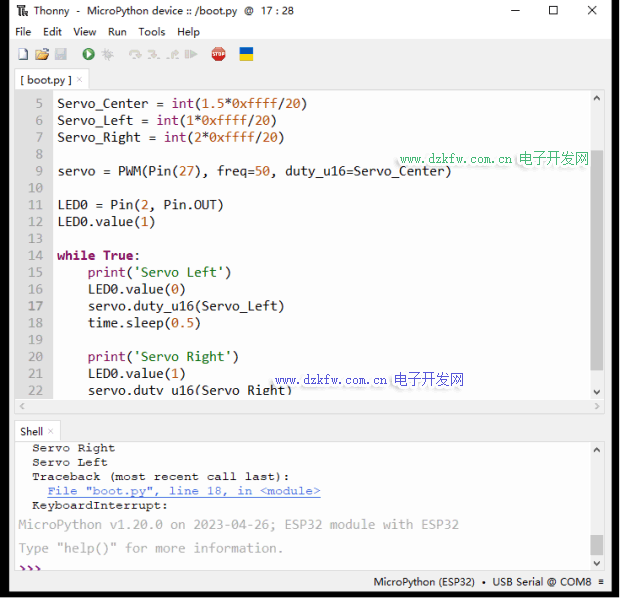
Ī»»Á‘ŕThonny ≠h(hu®Ęn)ĺ≥÷–£¨ņŻ”√…Ō√ś≥Ő–Úĺé›čīįŅŕŖM(j®¨n)––‹õľĢť_įl(f®°)ĆŔ”ŕ’ż≥£≥Ő–Úť_įl(f®°)£¨‘ŕShell÷–ĺÕŅ…“‘ Ļ”√ REPL ôC(j®©)÷∆ŖM(j®¨n)––ĹĽĽ• Ĺť_įl(f®°)£¨Ī»»ÁŌ¬√ś—› ĺ‘ŕ Shell ÷– √ŁŃÓŐŠ ĺ∑Żļů√ś›Ē»Ž≤ĽÕ¨√ŁŃÓ£¨ Ľō‹áļů£¨ MicroPython ąŐ(zh®™)––ĹY(ji®¶)ĻŻĶń—› ĺ°£ ÷Ļ§›Ē»Ž£¨ ĽÚ’ŖŅĹōź«į√śĶń√ŁŃÓ£¨ ∂ľŅ…“‘ŖM(j®¨n)––ąŐ(zh®™)––°£
2°Ę”≤ľĢ‹õľĢįŁ
ěťŃňĎ™(y®©ng)”√ĶĹÜő∆¨ôC(j®©)∆ĹŇ_(t®Ęi)÷–Ķń”≤ľĢń£ČK£¨‘ŕ MicroPython ÷–ŖÄľĮ≥…Ńňļ‹∂ŗŐō ‚Ķń‹õľĢįŁ°£Ď™(y®©ng)”√Ŗ@–©‹õľĢįŁŅ…“‘∂®Ńx“Ľ–©Ňc”≤ľĢŌŗÍP(gu®°n)Ķńƶ(du®¨)Ōů£¨ “‘ľįŌŗÍP(gu®°n)Ķń”≤ľĢļĮĒĶ(sh®ī)Ĺ”Ņŕ°£
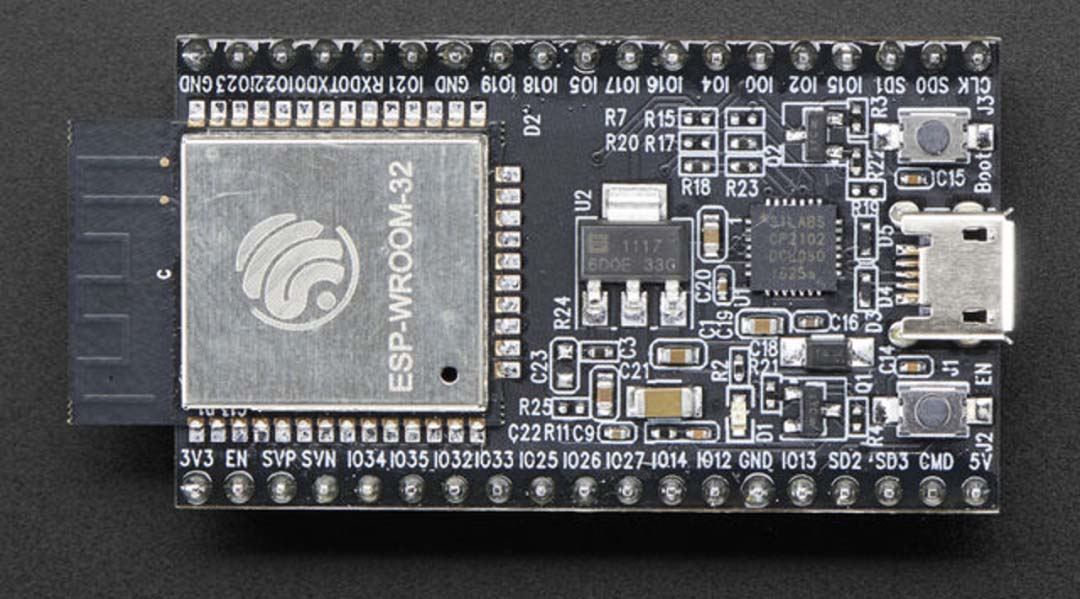
Ŗ@ņÔ“‘üoĺÄŽä‹Č÷«ń‹‹á÷ōļň–ńŅō÷∆įŚ ESP32ěťņż£¨ ‘ŕňŁĶńMicroPython ÷–ĺÕľĮ≥…Ńňļ‹∂ŗĶń”≤ľĢ‹õľĢįŁįŁņ®”–Ļ‹ń_°Ęģź≤ĹīģŅŕ°ĘPWM°ĘADC “‘ľįÕ‚≤ŅĶń I2C£¨ SPI īģ––Ĺ”ŅŕĶ»°£Õ®Ŗ^Ŗ@–©Őō ‚Ķń”≤ľĢÚĆ(q®Ī)Ą”(d®įng)‹õľĢįŁ£¨ ő“āÉĺÕŅ…“‘‘ŕPython ’Z—‘÷–‘LÜĖņŻ”√Ŗ@–©”≤ľĢŔY‘ī£¨ ĀŪŅō÷∆‹áń£ĶńŖ\(y®īn)––£¨ ł–÷™Õ‚≤Ņ≠h(hu®Ęn)ĺ≥Ķ»°£Ī»»ÁŖ@ņÔ « I2CŅāĺÄ‹õľĢįŁ£¨ Õ®Ŗ^ňŁŅ…“‘ŖBĹ”Üő∆¨ôC(j®©)Õ‚≤Ņļ‹∂ŗŔY‘ī£¨ěťŃňĎ™(y®©ng)”√Ŗ@āÄ(g®®)∂ňŅŕ£¨Ņ…“‘ import machine ‹õľĢįŁ÷–Ķń Pin£¨ I2C ń£ČK£¨Õ®Ŗ^∂®ŃxŌŗĎ™(y®©ng)Ķńƶ(du®¨)Ōů£¨ ‘O(sh®®)÷√ I2C ŅāĺÄ∂ňŅŕĶńĆŔ–‘£¨≤ĘŇcÕ‚≤Ņ‘O(sh®®)āšÕ®–Ň°£
Õ®Ŗ^Ćć(sh®™)Úě(y®§n) ’∆ő’łŁ∂ŗÜő∆¨ôC(j®©)ĶńŖ@–©”≤ľĢŔY‘īĶńŐōŁc(di®£n)ļÕ Ļ”√∑Ĺ∑® «Ď™(y®©ng)”√Üő∆¨ôC(j®©)Ĺ‚õQ‹áń£Ņō÷∆ÜĖÓ}ĶńĻ‹ń_ňý‘ŕ°£
3°Ę«∂»Ž Ĺ≥Ő–Úť_įl(f®°)
◊Óļů£¨ ő“āɔϒŌ¬ MicroPython ť_įl(f®°)«∂»Ž Ĺ≥Ő–ÚĶńŐōŁc(di®£n)°£Ć¶(du®¨)”ŕ≥űĆW(xu®¶)’Ŗ–Ť“™◊Ę“‚»żāÄ(g®®)∑Ĺ√śĶńÉ»(n®®i)»›°£Ķŕ“ĽāÄ(g®®)ĺÕ «≥Ő–Ú÷ųÓ}īůůw…Ō≥ ¨F(xi®§n)‘O(sh®®)÷√Ňc—≠≠h(hu®Ęn)É…≤Ņ∑÷°£‘ŕ‘O(sh®®)÷√≤Ņ∑÷£¨ÕýÕý–Ť“™ import ňý–Ť“™Ķń‹õľĢįŁ°Ę ƶ(du®¨)≥Ő–Ú‹õľĢ◊ÉŃŅļÕ”≤ľĢń£ČKŖM(j®¨n)––≥ű ľĽĮĶ»»Ľļů≥Ő–ÚŖM(j®¨n)»Ž“ĽāÄ(g®®)”… for ĽÚ’Ŗ while ’Zĺšėč(g®įu)≥…ĶńüoŌř—≠≠h(hu®Ęn)ĹY(ji®¶)ėč(g®įu)£¨ ‘ŕŖ@āÄ(g®®)ĹY(ji®¶)ėč(g®įu)÷–÷‹∆ŕĶńąŐ(zh®™)––“ĽŌĶŃ–Ķń÷łŃÓ£¨ ÕÍ≥…Ņō÷∆Ķń÷ų“™»őĄ’(w®ī)°£Ķŕ∂Ģ≤Ņ∑÷ĺÕ «–Ť“™ņŪĹ‚≥Ő–Ú÷–įŁļ¨”–“Ľ–©Ňc”≤ľĢŌŗÍP(gu®°n)Ķń◊ÉŃŅ°Ęƶ(du®¨)ŌůĶ»°£ňŁāÉ–Ť“™≤ĽÕ£ĶńŖM(j®¨n)––—≠≠h(hu®Ęn)ňĘ–¬ļÕ∑ý÷Ķ£¨Ŗ@–©Ćć(sh®™)ēr(sh®™)◊ÉŃŅĶń÷Ķ∑ī”≥ŃňÜő∆¨ôC(j®©)Õ‚≤Ņ∂ňŅŕĶńŽäČļ–ŇŐĖ(h®§o)£¨ ĽÚ’ŖÕ®”ćĒĶ(sh®ī)ďĢ(j®ī)Ķ»£¨ Õ®Ŗ^«į√śĶń—≠≠h(hu®Ęn)ĹY(ji®¶)ėč(g®įu)ŖM(j®¨n)––÷‹∆ŕĶń◊x»°ĽÚ’ŖŔx÷Ķ°£ ◊ÓĹK–ő≥…ƶ(du®¨)Õ‚≤ŅŽä¬∑ĶńŅō÷∆°£
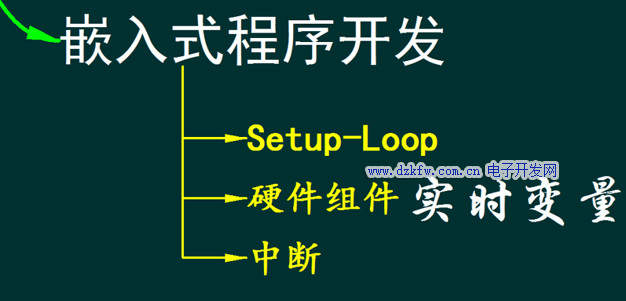
◊Óļů÷v“ĽŌ¬‘ŕ‹áń£Ņō÷∆÷–ēĢ(hu®¨)ŇŲĶĹĶńŃŪÕ‚“ĽāÄ(g®®)Őō ‚ĺé≥Őľľ–g(sh®ī)£¨ ń«ĺÕ «÷–Ēŗ°£÷–Ēŗ «‘ŕ Üő∆¨ôC(j®©)É»(n®®i)≤Ņ”≤ľĢ‘ŕĚM◊„ń≥–©ólľĢŌ¬ąŐ(zh®™)––Ķń≥Ő–Ú∆¨∂ő£¨ Ī»»ÁģĒ(d®°ng)∂®ēr(sh®™)∆ų”≤ľĢ≥Ų¨F(xi®§n)“Á≥Ų «ēĢ(hu®¨)ģa(ch®£n)…ķ÷‹∆ŕĶń∂®ēr(sh®™)∆ų÷–Ēŗ£Ľ ‘ŕÕ‚≤Ņ∂ňŅŕ≥Ų¨F(xi®§n)ŽäČļ◊ÉĽĮēr(sh®™)ēĢ(hu®¨)≥Ų¨F(xi®§n) IO –ŇŐĖ(h®§o)÷–Ēŗ£Ľ‘ŕīģŅŕĹ” ’ĶĹĒĶ(sh®ī)ďĢ(j®ī)Ķńēr(sh®™)ļÚēĢ(hu®¨)≥Ų¨F(xi®§n)īģŅŕÕ®”ć÷–ĒŗĶ»°£ž`ĽÓĶńĎ™(y®©ng)”√÷–Ēŗ «Üő∆¨ôC(j®©)«∂»Ž Ĺť_įl(f®°)Ķń÷ō“™ľľ«…°£ Õ®≥£«ťõrŌ¬£¨ «į√śĶń Loop —≠≠h(hu®Ęn) “‘ľį÷–Ēŗ≥Ő–Ú£¨ ‘ŕ«∂»Ž Ĺ‹õľĢť_įl(f®°)÷–ÕýÕýĪĽ∑Qěť«∂»Ž Ĺ≥Ő–ÚĶń ļůŇ_(t®Ęi) »őĄ’(w®ī)ļÕ «įŇ_(t®Ęi) »őĄ’(w®ī)°£
»ż°ĘĎ™(y®©ng)”√Ňeņż
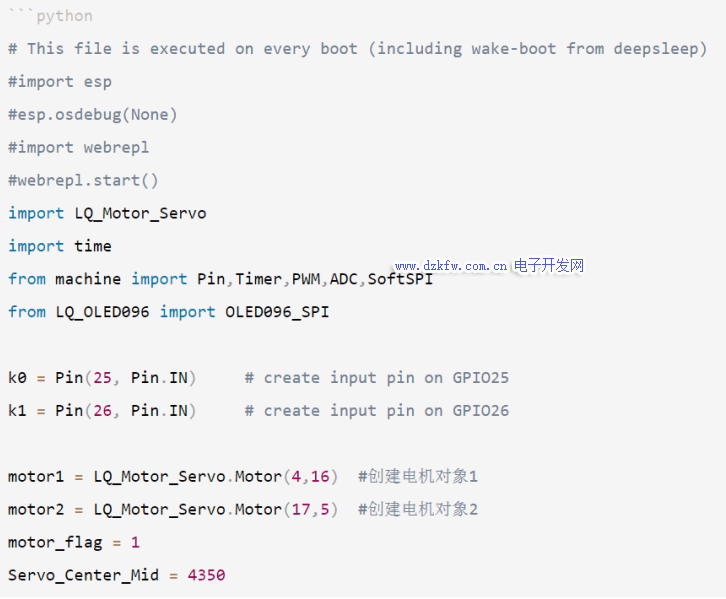
Ŗ@ņÔ“‘üoĺÄŽä‹Č÷«ń‹‹áĺCļŌúy(c®®)‘á≥Ő–Ú?y®§n)ťņż£? ĀŪ’f√ų“ĽŌ¬ MicroPython ≥Ő–ÚĶńŐōŁc(di®£n)°£Ć¶(du®¨)”ŕ≥űĆW(xu®¶)’ŖĀŪŅī£¨ Ŗ@āÄ(g®®)≥Ő–ÚÔ@Ķ√”–Łc(di®£n)ŹÕ(f®ī)Žs£¨Ķę‘ŕ’Żůw…Ō£¨ īůľ“ŅīĶĹ£¨ ňŁ∑÷ěť«įļůÉ…≤Ņ∑÷°£ «į√ś≤Ņ∑÷ĆŔ”ŕ Setup ≥ű ľĽĮ≤Ņ∑÷£¨ ◊ŲŃňļ‹∂ŗĶń”≤ľĢ≥ű ľĽĮ£¨ “≤∂®ŃxŃň“Ľ–©ļĮĒĶ(sh®ī)°£ļů√ś“Ľ≤Ņ∑÷£¨ĺÕ «”– while –ő≥…Ķń —≠≠h(hu®Ęn)Ņō÷∆≤Ņ∑÷£¨ Ŗ@–©ĆŔ”ŕ‹õľĢĶńļůŇ_(t®Ęi)»őĄ’(w®ī)≤Ņ∑÷°£‘ŕ√Ņ“Ľīő—≠≠h(hu®Ęn)÷–“ņīőąŐ(zh®™)–– OLED ∆ŃńĽĶńňĘ–¬£¨įīśIĶńôzúy(c®®)ŐéņŪ£¨“‘ľįŅō÷∆įŚ…Ō LED ĶńťW†q£¨ ”√”ŕÔ@ ĺ≥Ő–ÚŖ\(y®īn)––†ÓĎB(t®§i)°£īňēr(sh®™)Ļņ”č(j®¨)īůľ“ēĢ(hu®¨)”–“ĽāÄ(g®®)“…ÜĖ£¨ ‹áń£Ŗ\(y®īn)Ą”(d®įng)÷–∂śôC(j®©)ļÕŽäôC(j®©)Ņō÷∆īķīa‘ŕńńņÔąŐ(zh®™)––ńō£Ņ
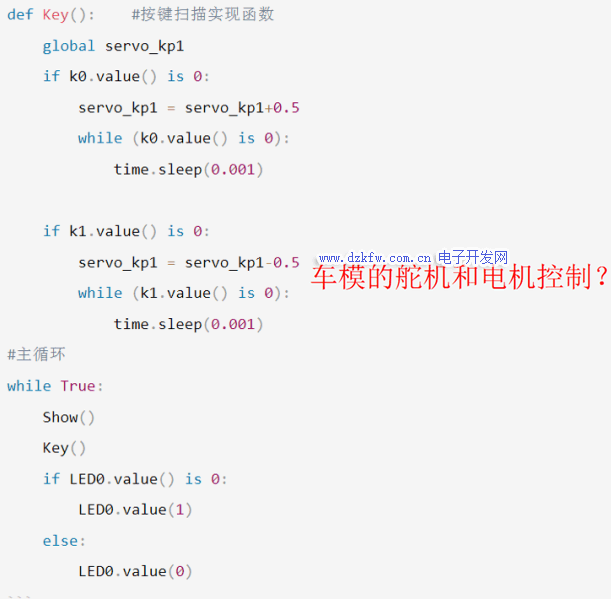
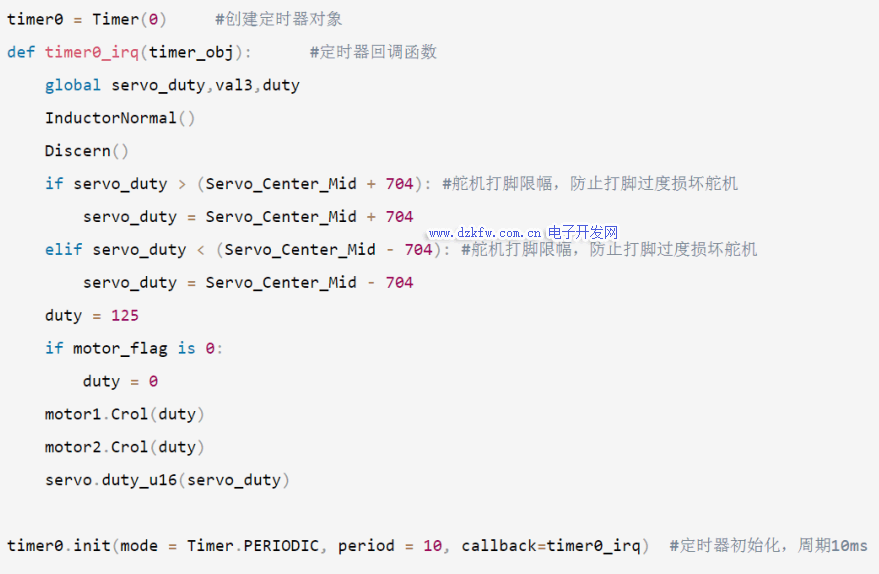
ěťŃňĹ‚õQŖ@āÄ(g®®)“…ÜĖ£¨ īůľ“ŅīŖ@āÄ(g®®)ĺCļŌ—› ĺ≥Ő–ÚĶń÷–ťg≤Ņ∑÷£¨‘ŕŖ@ņÔ∂®ŃxŃň ESP32 ”≤ľĢ∂®ēr(sh®™)∆ųƶ(du®¨)Ōů£¨ timer0£¨Ĺ”Ō¬ĀŪ∂®ŃxŃň“ĽāÄ(g®®)ļĮĒĶ(sh®ī)£¨ ”√”ŕ∂®ēr(sh®™)∆ų÷–ĒŗļĮĒĶ(sh®ī)ļů√ś «Ć¶(du®¨)∂®ēr(sh®™)∆ųŖM(j®¨n)––≥ű ľĽĮ£¨‘O(sh®®)÷√∂®ēr(sh®™)∆ųĻ§◊ųń£ Ĺěť÷‹∆ŕ÷–Ēŗń£ Ĺ£¨÷–Ēŗ÷‹∆ŕěť 10ļŃ√Ž£¨ “≤ĺÕ «100Hz Ķń÷ōŹÕ(f®ī)Ól¬ £¨Ķ໿āÄ(g®®)ÖĘĒĶ(sh®ī)‘O(sh®®)÷√÷–Ēŗ∑ĢĄ’(w®ī)≥Ő–Ú°£Ŗ@āÄ(g®®)≥Ő–ÚĺÕ ««į√ś∂®ŃxĶń timer0 irq ļĮĒĶ(sh®ī)°£“ÚīňŖ@āÄ(g®®)÷–Ēŗ≥Ő–ÚĺÕēĢ(hu®¨)‘ŕ Timer0 Ķń÷–ĒŗÚĆ(q®Ī)Ą”(d®įng)Ō¬£¨ √ŅłŰĺęī_Ķń 10ļŃ√Ž£¨ ĺÕĪĽąŐ(zh®™)––“Ľīő°£ ÷–Ēŗ≥Ő–Ú?q®Ī)Ŕ”ŕ«∂»Ž Ĺ‹õľĢĶń«įŇ_(t®Ęi)»őĄ’(w®ī)°£ ÷–Ēŗ≥Ő–Ú∂®ŃxŃň÷–Ēŗ»őĄ’(w®ī)Ŗ@–© «–Ť“™”√ĶĹĶń»ęĺ÷◊ÉŃŅ£¨ ļÕ≥Ő–Ú÷–∆šňŁļĮĒĶ(sh®ī)ŖM(j®¨n)–––ŇŌĘāųŖf°£◊x»°ŽäīŇąŲ(ch®£ng)āųł–∆ųĶńĹĽŃųŽäČļ÷ĶŇ–ĒŗŔźĶņĶńĆŔ–‘”č(j®¨)ň„∂śôC(j®©)∆ę“∆ŃŅƶ(du®¨)∂śôC(j®©)∆ę“∆ŃŅŖM(j®¨n)––Ōř∑ýŌ¬√śĺÕ «‘O(sh®®)÷√ŽäôC(j®©)Ŗ\(y®īn)––ňŔ∂»ļÕ∂śôC(j®©)∆ę“∆ŃŅ°£÷–ťg≤Ņ∑÷ «”√”ŕŅō÷∆ŽäôC(j®©) «∑ŮŖ\(y®īn)––ĶńŖČ›č°£÷ģňý“‘ņŻ”√÷–Ēŗ÷‹∆ŕŖM(j®¨n)––‹áń£Ņō÷∆£¨ ÷ų“™ «ěťŃňĪ£◊CŅō÷∆ēr(sh®™)ťgĶńĺęī_ļÕ÷‹∆ŕĶń∑Ä(w®ßn)∂®°£ Ŗ@“™Ī»‘ŕ while —≠≠h(hu®Ęn)÷–ąŐ(zh®™)––Ņō÷∆√ŁŃÓłŁľ”Ņ…ŅŅ°£
īůľ“ł–Ňd»§ŖÄŅ…“‘—–ĺŅ“ĽŌ¬Ŗ@āÄ(g®®)≥Ő–Ú«į√śĶń≥ű ľĽĮŖ^≥Ő£¨Ć¶(du®¨)”ŕ“Ľ–©ļÕ”≤ľĢŌŗÍP(gu®°n)Ķńń£ČKĶń Ļ”√£¨Ņ…“‘ŇšļŌļů√śŌŗÍP(gu®°n)ĶńĆć(sh®™)Úě(y®§n)ĹťĹBŖM(j®¨n)––¬ď(li®Ęn)ŌĶ°£Õ®Ŗ^Ŗ@āÄ(g®®)≥Ő–Ú£¨ īůľ“ń‹ČÚ žŌ§ MicroPython ĺéĆĎ«∂»Ž Ĺ‹õľĢĶń“Ľ–©ŐōŁc(di®£n)°£
 ∑ĶĽōŪĒ≤Ņ
∑ĶĽōŪĒ≤Ņ ňĘ–¬Ūď√ś
ňĘ–¬Ūď√ś Ō¬ĶĹŪďĶ◊
Ō¬ĶĹŪďĶ◊