
▒Š╬─īó└^└mć·└@ȵÖCĄ─┐žųŲ▀MąąŻ¼╬ęéāīóęįTower Pro Ż©▌x╩óŻ®SG90ȵÖCĄ─┐žųŲ×ķ└²Ż¼ę“×ķSG90╩Ū╩ą├µ╔ŽārĖ±▌^▒Ńę╦Ż¼ę▓╩ŪīŹ“×ųąė├Ą├ūŅČÓĄ─«aŲĘų«ę╗ĪŻ
ȵÖC
ȵÖCŻ©servo motorŻ®Ż¼│Żė├ė┌▀b┐ž─Żą═’wÖCŻ¼╦∙ęįėų│ŻĘQ×ķRC╦┼Ę■ļŖÖCŻ©RC ServoŻ¼Radio Control ServoŻ¼Remote Control ServoŻ®ĪŻįöęŖŻ║╩▓├┤╩ŪȵÖCŻ┐
ȵÖC└’║¼ėąų▒┴„±R▀_Īó²X▌åŽõĪó▌S▒·Īóęį╝░┐žųŲļŖ┬ĘŻ¼╬ęéā┐╔═Ė▀^ą┼╠¢┐žųŲ▌S▒·Ą─▐DäėĮŪČ╚Ż¼┤¾Ė┼Č╝╩Ū0ĄĮ180Č╚Ż¼Ą½▓╗═¼ÅS┼Ųą═╠¢Ģ■ėą▓╗═¼Ą─ĘČć·Ż╗Įøė╔²X▌åŽõĮĄ╦┘║¾Ż¼ūā│╔▀m«ö┐╔ė├Ą─▐D╦┘Ż¼▓óŪę╠ß╣®Ė³Ė▀Ą─▐DŠžŻ©┼ż┴”Ż®ĪŻįöęŖŻ║ȵÖCĄ─╣żū„įŁ└Ē
▓╗▀^├┐éĆÅS┼Ųą═╠¢Ą─ȵÖC┐╔į╩įSą²▐DĄ─ĮŪČ╚Ė„▓╗ŽÓ═¼Ż¼ę▓Š═╩Ūšf┐╔Įė╩▄Ą─ą┼╠¢├}ø_ĘČć·ę▓▓╗ŽÓ═¼Ż¼▒žĒÜ▓ķķå«aŲĘ┘Y┴ŽęÄĖ±Ģ°Ż¼╚¶│¼│÷ĘČć·┐╔─▄Ģ■ōp║”ȵÖCĪŻŽ┬├µ╩ŪTower Pro SG90Ą─ęÄĖ±Ż║
ųž┴┐Ż║9g
│▀┤ńŻ║23*12.2*29mm
╣żū„ļŖē║Ż║4.8V▐DŠžŻ║1.8kg-cmŻ¼«ö╣żū„ļŖē║×ķ4.8VĢr
▀\▐D╦┘Č╚Ż║0.1├ļ ©M 60Č╚ Ż¼«ö╣żū„ļŖē║×ķ4.8VĢr
├}ø_īÆČ╚ĘČć·Ż║500~2400µs
╦└ŅlĦīÆČ╚Ż©dead band widthŻ®Ż║10µs
Å─ųą╬ęéā┐╔ų¬Ż¼┐╔į╩įSĄ─├}ø_ĘČć·╩Ū500~2400µsŻ¼ę▓Š═╩Ū0.5~2.4msŻ¼▒╚äéäéšfĄ─ę╗░ŃĘČć·▀Ćę¬īÆŻ¼ę▓Š═┤·▒Ē▀@éĆȵÖC─▄ą²▐DĄ─ĮŪČ╚Ė³┤¾ĪŻ┴Ē═ŌėąĒŚųĄĄ├ę╗╠ߥ─öĄō■╩Ū╦└ŅlĦīÆČ╚Ż¼ęŌ╦╝╩ŪšfŻ¼ę“×ķą┼╠¢┐╔─▄▓╗ĘĆČ©Č°╔ŽŽ┬ŲĘ³Ż¼«ö▀@ę╗┤╬├}ø_īÆČ╚┼c╔Žę╗┤╬ŽÓ▓Ņ▓╗│¼▀^╦└ŅlĦīÆČ╚ĢrŻ¼ČµÖC▒Ń▓╗Ģ■äėū„ĪŻ
servo.h┐žųŲȵÖC
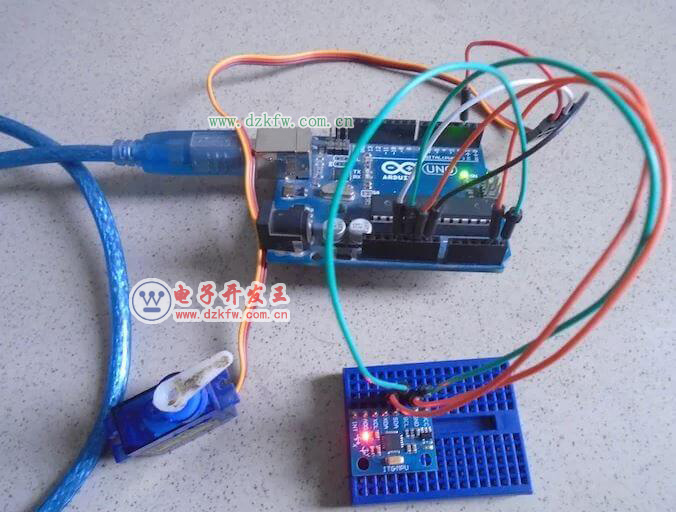
▒Š┤╬įć“ׯ¼╬ęéāų▒Įėė├ArduinoĄ─5V─_×ķȵÖC╣®ļŖĪŻ╚¶╩╣ė├│¼▀^ā╔éĆȵÖCŻ¼ätæ¬įō╩╣ė├¬Ü┴óĄ─ļŖį┤×ķȵÖC╣®ļŖŻ¼ėøĄ├╣▓ĄžĪŻą┼╠¢─_╩╣ė├ArduinoĄ─D9ĪŻ Arduinoā╚Į©▓┘┐žČµÖCĄ─ś╦£╩ÄņŻ¼╩╣ė├ĘĮĘ©ĘŪ│Ż║åå╬ĪŻį┌╚ń║╬╩╣ė├ArduinoȵÖCÄņservo.hę╗╬─ųąŻ¼╬ęéāę▓▀Mąą┴╦ŽÓĻP║»öĄĄ─ĮķĮBĪŻŽ┬├µęį▓┘┐žČµÖCĄ─ą²▐DĮŪČ╚×ķ└²Ż¼üĒ┐┤┐┤servo.h╚ń║╬┐žųŲȵÖCĪŻ▒ŠīŹ“×╩╣ė├┤╦servo.h┤·┤aÄņĢrŻ¼D9┼cD10¤oĘ©▌ö│÷PWMą┼╠¢Ż¼ė┌╩Ū╬ęéāīóȵÖCĄ─ą┼╠¢ŠĆĮėį┌öĄ╬╗─_╬╗9╗“10ĪŻ ┤·┤a╚ńŽ┬Ż║
#include <Servo.h>
Servo myservo; // Į©┴óServoīŹ└²Ż¼┐žųŲȵÖC
void setup()
{
myservo.attach(9); // ▀BĮėD9Ż¼ČµÖCĄ─ą┼╠¢ŠĆ
}
void loop()
{
for(int i = 0; i <= 180; i+=1){
myservo.write(i); // ╩╣ė├writeŻ¼é„╚ļĮŪČ╚ųĄŻ¼Å─0Č╚▐DĄĮ180Č╚
delay(20);
}
for(int i = 180; i >= 0; i-=1){
myservo.write(i);// ╩╣ė├writeŻ¼é„╚ļĮŪČ╚ųĄŻ¼Å─180Č╚▐DĄĮ0Č╚
delay(20);
}
}
▓╗▀^Servo.hŅAįOĄ─├}ø_īÆČ╚ĘČć·╩Ū544ĄĮ2400µsŻ¼Ė·SG90ȵÖCĄ─500ĄĮ2400▓Ņ┴╦ę╗ą®ą®Ż¼╬ęéā┐╔ą▐š²┤╦³cĪŻ
#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9, 500, 2400); // ą▐š²├}ø_īÆČ╚ĘČć·
myservo.write(90); // ķ_╩╝Ž╚ų├ųą90Č╚
delay(3000);
}
void loop()
{
for(int i = 500; i <= 2400; i+=100){
myservo.writeMicroseconds(i); // ų▒Įėęį├}ø_īÆČ╚┐žųŲ
delay(300);
}
for(int i = 2400; i >= 500; i-=100){
myservo.writeMicroseconds(i);
delay(300);
}
}
▀@└’ąĶę¬ūóęŌĄ─Ż¼╩╣ė├ȵÖCŪ░▒žĒÜ▓ķįāȵÖCĄ─ęÄĖ±ģóöĄ▒ĒŻ¼▓ķĄĮš²┤_Ą─├}ø_īÆČ╚ĘČć·Ż¼╚ń╣¹┼cservo.hĄ─ŅAįOĘČć·ėąŲ½▓ŅŻ¼ąĶę¬▓╔ė├Ī░myservo.attach(9, 500, 2400)Ī▒Ą─ĘĮ╩Į▀Mąąą▐š²ĪŻ╩╣ė├writeMicroseconds║»öĄĢrę▓ę¬ūóęŌŻ¼▓╗─▄é„╚ļ│¼│÷ĘČć·Ą─ųĄŻ¼Ę±ät┐╔─▄Ģ■ōpē─ȵÖCĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū