
▀\äė╦┼Ę■ę╗░ŃČ╝╩Ū╚²Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)Ż¼Å─ā╚(n©©i)ĄĮ═Ōę└┤╬╩ŪļŖ┴„Łh(hu©ón)╦┘Č╚Łh(hu©ón)╬╗ų├Łh(hu©ón)ĪŻ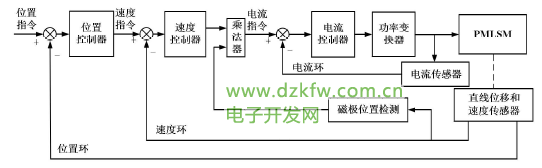
1Īó╩ūŽ╚ļŖ┴„Łh(hu©ón)Ż║ļŖ┴„Łh(hu©ón)Ą─▌ö╚ļ╩Ū╦┘Č╚Łh(hu©ón)PIDš{(di©żo)╣Ø(ji©”)║¾Ą──ŪéĆ▌ö│÷Ż¼╬ęéāĘQ×ķĪ░ļŖ┴„Łh(hu©ón)ĮoČ©Ī▒░╔Ż¼╚╗║¾─žŠ═╩ŪļŖ┴„Łh(hu©ón)Ą─▀@éĆĮoČ©║═Ī░ļŖ┴„Łh(hu©ón)Ą─Ę┤üĪ▒ųĄ▀M(j©¼n)ąą▒╚▌^║¾Ą─▓ŅųĄį┌ļŖ┴„Łh(hu©ón)ā╚(n©©i)ū÷PIDš{(di©żo)╣Ø(ji©”)▌ö│÷ĮoļŖÖC(j©®)Ż¼Ī░ļŖ┴„Łh(hu©ón)Ą─▌ö│÷Ī▒Š═╩ŪļŖÖC(j©®)Ą─├┐ŽÓĄ─ŽÓļŖ┴„Ż¼Ī░ļŖ┴„Łh(hu©ón)Ą─Ę┤üĪ▒▓╗╩ŪŠÄ┤aŲ„Ą─Ę┤üČ°╩Ūį┌“ī(q©▒)äėŲ„ā╚(n©©i)▓┐░▓čbį┌├┐ŽÓĄ─╗¶Ā¢į¬╝■Ż©┤┼ł÷Ėąæ¬(y©®ng)ūā?y©Łu)ķļŖ┴„ļŖē║ą┼╠¢Ż®Ę┤üĮoļŖ┴„Łh(hu©ón)Ą─ĪŻ
2Īó╦┘Č╚Łh(hu©ón)Ż║╦┘Č╚Łh(hu©ón)Ą─▌ö╚ļŠ═╩Ū╬╗ų├Łh(hu©ón)PIDš{(di©żo)╣Ø(ji©”)║¾Ą─▌ö│÷ęį╝░╬╗ų├įO(sh©©)Č©Ą─Ū░üųĄŻ¼╬ęéāĘQ×ķĪ░╦┘Č╚įO(sh©©)Č©Ī▒Ż¼▀@éĆĪ░╦┘Č╚įO(sh©©)Č©Ī▒║═Ī░╦┘Č╚Łh(hu©ón)Ę┤üĪ▒ųĄ▀M(j©¼n)ąą▒╚▌^║¾Ą─▓ŅųĄį┌╦┘Č╚Łh(hu©ón)ū÷PIDš{(di©żo)╣Ø(ji©”)Ż©ų„ę¬╩Ū▒╚└²į÷ęµ║═ĘeĘų╠Ä└ĒŻ®║¾▌ö│÷Š═╩Ū╔Ž├µųvĄĮĄ─Ī░ļŖ┴„Łh(hu©ón)Ą─ĮoČ©Ī▒ĪŻ╦┘Č╚Łh(hu©ón)Ą─Ę┤üüĒūįė┌ŠÄ┤aŲ„Ą─Ę┤ü║¾Ą─ųĄĮø(j©®ng)▀^Ī░╦┘Č╚▀\╦ŃŲ„Ī▒Ą├ĄĮĄ─ĪŻ
3Īó╬╗ų├Łh(hu©ón)Ż║╬╗ų├Łh(hu©ón)Ą─▌ö╚ļŠ═╩Ū═Ō▓┐Ą─├}ø_Ż©═©│ŻŪķørŽ┬Ż¼ų▒ĮėīæöĄ(sh©┤)ō■(j©┤)ĄĮ“ī(q©▒)äėŲ„ĄžųĘĄ─╦┼Ę■└²═ŌŻ®Ż¼═Ō▓┐Ą─├}ø_Įø(j©®ng)▀^ŲĮ╗¼×V▓©╠Ä└Ē║═ļŖūė²X▌åėŗ╦Ń║¾ū„×ķĪ░╬╗ų├Łh(hu©ón)Ą─įO(sh©©)Č©Ī▒Ż¼įO(sh©©)Č©║═üĒūįŠÄ┤aŲ„Ę┤üĄ─├}ø_ą┼╠¢Įø(j©®ng)▀^Ų½▓ŅėŗöĄ(sh©┤)Ų„Ą─ėŗ╦Ń║¾Ą─öĄ(sh©┤)ųĄį┌Įø(j©®ng)▀^╬╗ų├Łh(hu©ón)Ą─PIDš{(di©żo)╣Ø(ji©”)Ż©▒╚└²į÷굚{(di©żo)╣Ø(ji©”)Ż¼¤oĘeĘų╬óĘųŁh(hu©ón)╣Ø(ji©”)Ż®║¾▌ö│÷║═╬╗ų├ĮoČ©Ą─Ū░üą┼╠¢Ą─║ŽųĄŠ═śŗ(g©░u)│╔┴╦╔Ž├µųvĄ─╦┘Č╚Łh(hu©ón)Ą─ĮoČ©ĪŻ╬╗ų├Łh(hu©ón)Ą─Ę┤üę▓üĒūįė┌ŠÄ┤aŲ„ĪŻ
ŠÄ┤aŲ„░▓čbė┌╦┼Ę■ļŖÖC(j©®)╬▓▓┐Ż¼╦³║═ļŖ┴„Łh(hu©ón)ø]ėą╚╬║╬┬ō(li©ón)ŽĄŻ¼╦¹▓╔śėüĒūįė┌ļŖÖC(j©®)Ą─▐D(zhu©Żn)äėČ°▓╗╩ŪļŖÖC(j©®)ļŖ┴„Ż¼║═ļŖ┴„Łh(hu©ón)Ą─▌ö╚ļĪó▌ö│÷ĪóĘ┤üø]ėą╚╬║╬┬ō(li©ón)ŽĄĪŻČ°ļŖ┴„Łh(hu©ón)╩Ūį┌“ī(q©▒)äėŲ„ā╚(n©©i)▓┐ą╬│╔Ą─Ż¼╝┤╩╣ø]ėąļŖÖC(j©®)Ż¼ų╗ę¬į┌├┐ŽÓ╔Ž░▓čb─ŻöMžō(f©┤)▌dŻ©└²╚ńļŖ¤¶┼▌Ż®ļŖ┴„Łh(hu©ón)Š═─▄ą╬│╔Ę┤ü╣żū„ĪŻ
šä?w©┤)äPIDĖ„ūįī”▓ŅųĄš{(di©żo)╣Ø(ji©”)ī”ŽĄĮy(t©»ng)Ą─ė░ĒæŻ║
1Īóå╬¬ÜĄ─PŻ©▒╚└²Ż®Š═╩Ūīó▓ŅųĄ▀M(j©¼n)ąą│╔▒╚└²Ą─▀\╦ŃŻ¼╦³Ą─’@ų°╠ž³cŠ═╩Ūėą▓Ņš{(di©żo)╣Ø(ji©”)Ż¼ėą▓ŅĄ─ęŌ┴xŠ═╩Ūš{(di©żo)╣Ø(ji©”)▀^│╠ĮY(ji©”)╩°║¾Ż¼▒╗š{(di©żo)┴┐▓╗┐╔─▄┼cįO(sh©©)Č©ųĄ£╩(zh©│n)┤_ŽÓĄ╚Ż¼╦³éāų«ķgę╗Č©ėąÜł▓ŅŻ¼Üł▓ŅŠ▀¾wųĄ─·┐╔ęį═©▀^▒╚└²ĻP(gu©Īn)ŽĄėŗ╦Ń│÷ĪŻį÷╝ė▒╚└²īóĢ■ėąą¦£pąĪÜł▓Ņ▓óį÷╝ėŽĄĮy(t©»ng)Ēææ¬(y©®ng)Ż¼Ą½╚▌ęūī¦(d©Żo)ų┬ŽĄĮy(t©»ng)╝ż┴ęš╩Ä╔§ų┴▓╗ĘĆ(w©¦n)Č©ĪŻ
2Īóå╬¬ÜĄ─IŻ©ĘeĘųŻ®Š═╩Ū╩╣š{(di©żo)╣Ø(ji©”)Ų„Ą─▌ö│÷ą┼╠¢Ą─ūā╗»╦┘Č╚┼c▓ŅųĄą┼╠¢│╔š²▒╚Ż¼┤¾╝ę▓╗ļy└ĒĮŌŻ¼╚ń╣¹▓ŅųĄ┤¾Ż¼ätĘeĘųŁh(hu©ón)╣Ø(ji©”)Ą─ūā╗»╦┘Č╚┤¾Ż¼▀@éĆŁh(hu©ón)╣Ø(ji©”)Ą─š²▒╚│ŻöĄ(sh©┤)Ą─▒╚└²Ą╣öĄ(sh©┤)╬ęéāį┌╦┼Ę■ŽĄĮy(t©»ng)└’═©│ŻĮą╦³×ķĘeĘųĢrķg│ŻöĄ(sh©┤)Ż¼ĘeĘųĢrķg│ŻöĄ(sh©┤)įĮąĪęŌ╬Čų°ŽĄĮy(t©»ng)Ą─ūā╗»╦┘Č╚įĮ┐ņŻ¼╦∙ęį═¼śė╚ń╣¹į÷┤¾ĘeĘų╦┘Č╚Ż©ę▓Š═╩Ū£pąĪĘeĘųĢrķg│ŻöĄ(sh©┤)Ż®īóĢ■ĮĄĄ═┐žųŲŽĄĮy(t©»ng)Ą─ĘĆ(w©¦n)Č©│╠Č╚Ż¼ų▒ĄĮūŅ║¾│÷¼F(xi©żn)░l(f©Ī)╔óĄ─š╩Ä▀^│╠ĪŻ▀@éĆŁh(hu©ón)╣Ø(ji©”)ūŅ┤¾Ą─║├╠ÄŠ═╩Ū▒╗š{(di©żo)┴┐ūŅ║¾╩Ūø]ėąÜł▓ŅĄ─ĪŻ
3ĪóPIŻ©▒╚└²ĘeĘųŻ®Š═╩ŪŠC║ŽP║═IĄ─ā×(y©Łu)³cŻ¼└¹ė├Pš{(di©żo)╣Ø(ji©”)┐ņ╦┘ĄųŽ¹Ė╔ö_Ą─ė░ĒæŻ¼═¼Ģr└¹ė├Iš{(di©żo)╣Ø(ji©”)Ž¹│²Üł▓ŅĪŻ
4Īóå╬¬ÜĄ─DŻ©╬óĘųŻ®Š═╩ŪĖ∙ō■(j©┤)▓ŅųĄĄ─ĘĮŽ“║═┤¾ąĪ▀M(j©¼n)ąąš{(di©żo)╣Ø(ji©”)Ą─Ż¼š{(di©żo)╣Ø(ji©”)Ų„Ą─▌ö│÷┼c▓ŅųĄī”ė┌ĢrķgĄ─ī¦(d©Żo)öĄ(sh©┤)│╔š²▒╚Ż¼╬óĘųŁh(hu©ón)╣Ø(ji©”)ų╗─▄ŲĄĮ▌oų·Ą─š{(di©żo)╣Ø(ji©”)ū„ė├Ż¼╦³┐╔ęį┼cŲõ╦¹š{(di©żo)╣Ø(ji©”)ĮY(ji©”)║Ž│╔PD║═PIDš{(di©żo)╣Ø(ji©”)ĪŻ╦³Ą─║├╠Ä╩Ū┐╔ęįĖ∙ō■(j©┤)▒╗š{(di©żo)╣Ø(ji©”)┴┐Ż©▓ŅųĄŻ®Ą─ūā╗»╦┘Č╚üĒ▀M(j©¼n)ąąš{(di©żo)╣Ø(ji©”)Ż¼Č°▓╗ꬥ╚ĄĮ│÷¼F(xi©żn)┴╦║▄┤¾Ą─Ų½▓Ņ║¾▓┼ķ_╩╝äėū„Ż¼ŲõīŹŠ═╩Ū┘xėĶ┴╦š{(di©żo)╣Ø(ji©”)Ų„ęį─│ĘN│╠Č╚╔ŽĄ─ŅA(y©┤)ęŖąįŻ¼┐╔ęįį÷╝ėŽĄĮy(t©»ng)ī”╬óąĪūā╗»Ą─Ēææ¬(y©®ng)╠žąįĪŻ
5ĪóPIDŠC║Žū„ė├┐╔ęį╩╣ŽĄĮy(t©»ng)Ė³╝ė£╩(zh©│n)┤_ĘĆ(w©¦n)Č©Ą─▀_(d©ó)ĄĮ┐žųŲĄ─Ų┌═¹ĪŻ
╦┼Ę■Ą─ļŖ┴„Łh(hu©ón)Ą─PID│ŻöĄ(sh©┤)ę╗░ŃČ╝╩Ūį┌“ī(q©▒)äėŲ„ā╚(n©©i)▓┐įO(sh©©)Č©║├Ą─Ż¼▓┘ū„╩╣ė├š▀▓╗ąĶę¬Ė³Ė─ĪŻ
╦┘Č╚Łh(hu©ón)ų„ę¬▀M(j©¼n)ąąPIŻ©▒╚└²║═ĘeĘųŻ®Ż¼▒╚└²Š═╩Ūį÷굯¼╦∙ęį╬ęéāę¬ī”╦┘Č╚į÷ęµ║═╦┘Č╚ĘeĘųĢrķg│ŻöĄ(sh©┤)▀M(j©¼n)ąą║Ž▀mĄ─š{(di©żo)╣Ø(ji©”)▓┼─▄▀_(d©ó)ĄĮ└ĒŽļą¦╣¹ĪŻ
╬╗ų├Łh(hu©ón)ų„ę¬▀M(j©¼n)ąąPŻ©▒╚└²Ż®š{(di©żo)╣Ø(ji©”)ĪŻī”┤╦╬ęéāų╗ę¬įO(sh©©)Č©╬╗ų├Łh(hu©ón)Ą─▒╚└²į÷굊═║├┴╦ĪŻ
ĪĪĪĪ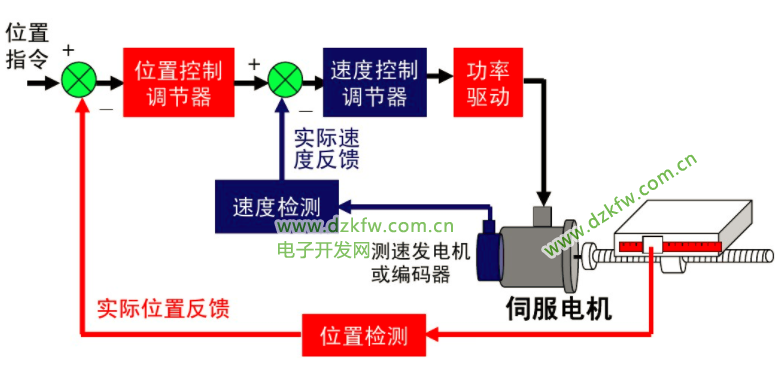
╬╗ų├Łh(hu©ón)Īó╦┘Č╚Łh(hu©ón)Ą─ģóöĄ(sh©┤)š{(di©żo)╣Ø(ji©”)ø]ėą╩▓├┤╣╠Č©Ą─öĄ(sh©┤)ųĄŻ¼ę¬Ė∙ō■(j©┤)═Ō▓┐žō(f©┤)▌dĄ─ÖC(j©®)ąĄé„äė▀BĮėĘĮ╩ĮĪóžō(f©┤)▌dĄ─▀\äėĘĮ╩ĮĪóžō(f©┤)▌dæT┴┐Īóī”╦┘Č╚Īó╝ė╦┘Č╚ę¬Ū¾ęį╝░ļŖÖC(j©®)▒Š╔ĒĄ─▐D(zhu©Żn)ūėæT┴┐║═▌ö│÷æT┴┐Ą╚Ą╚║▄ČÓŚl╝■üĒøQČ©Ż¼š{(di©żo)╣Ø(ji©”)Ą─║åå╬ĘĮĘ©╩Ūį┌Ė∙ō■(j©┤)═Ō▓┐žō(f©┤)▌dĄ─Ūķør▀M(j©¼n)ąą┤¾¾wĮø(j©®ng)“ץ─ĘČć·ā╚(n©©i)īóį÷ęµģóöĄ(sh©┤)Å─ąĪ═∙┤¾š{(di©żo)Ż¼ĘeĘųĢrķg│ŻöĄ(sh©┤)Å─┤¾═∙ąĪš{(di©żo)Ż¼ęį▓╗│÷¼F(xi©żn)šäė│¼š{(di©żo)Ą─ĘĆ(w©¦n)æB(t©żi)ųĄ×ķūŅ╝čųĄ▀M(j©¼n)ąąįO(sh©©)Č©ĪŻ
«ö(d©Īng)▀M(j©¼n)ąą╬╗ų├─Ż╩ĮąĶ꬚{(di©żo)╣Ø(ji©”)╬╗ų├Łh(hu©ón)ĢrŻ¼ūŅ║├Ž╚š{(di©żo)╣Ø(ji©”)╦┘Č╚Łh(hu©ón)Ż©┤╦Ģr╬╗ų├Łh(hu©ón)Ą─▒╚└²į÷ęµįO(sh©©)Č©į┌Įø(j©®ng)“×ųĄĄ─ūŅąĪųĄŻ®Ż¼š{(di©żo)╣Ø(ji©”)╦┘Č╚Łh(hu©ón)ĘĆ(w©¦n)Č©║¾Ż¼į┌š{(di©żo)╣Ø(ji©”)╬╗ų├Łh(hu©ón)į÷굯¼▀m┴┐ų▓Įį÷╝ėŻ¼╬╗ų├Łh(hu©ón)Ą─Ēææ¬(y©®ng)ūŅ║├▒╚╦┘Č╚Łh(hu©ón)┬²ę╗³cŻ¼▓╗╚╗ę▓╚▌ęū│÷¼F(xi©żn)╦┘Č╚š╩ÄĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū