
▀\äė┐žųŲį┌╣ż┐žŅIė“╩Ū╩«Ęų│ŻęŖĄ─Ż¼╬ęéāĮø│Żė├ĄĮĄ─▀\äė┐žųŲĄ─ļŖÖCų„ę¬Ęųā╔┤¾ŅÉŻ¼ę╗ĘN╩Ū╦┼Ę■ļŖÖC┐žųŲŻ¼▀Ćėąę╗ĘN╩Ū▓Į▀MļŖÖC┐žųŲĪŻ
▒Š╬─ų„ę¬ųvĮŌĄ─╩Ū╦┼Ę■ļŖÖCĄ─╬╗ų├┐žųŲ─Ż╩ĮĪŻ╦┼Ę■ļŖÖCĄ─┐žųŲ─Ż╩ĮĘų╚²ĘNŻ║1Īó╬╗ų├┐žųŲ─Ż╩ĮŻ¼2Īó╦┘Č╚┐žųŲ─Ż╩ĮĪó3Īó┼żŠž┐žųŲ─Ż╩ĮĪŻŲõųą║¾ā╔ĘN─Ż╩ĮČ╝▒╚▌^║åå╬Ż¼æ¬ė├ŲüĒę▓ĘŪ│ŻĄ─║åå╬ĪŻ╦∙ęį╬ę▒Š┤╬ųvĮŌĄ─╩Ū▒╚▌^┬ķ¤®Ą─╬╗ų├┐žųŲĪŻ
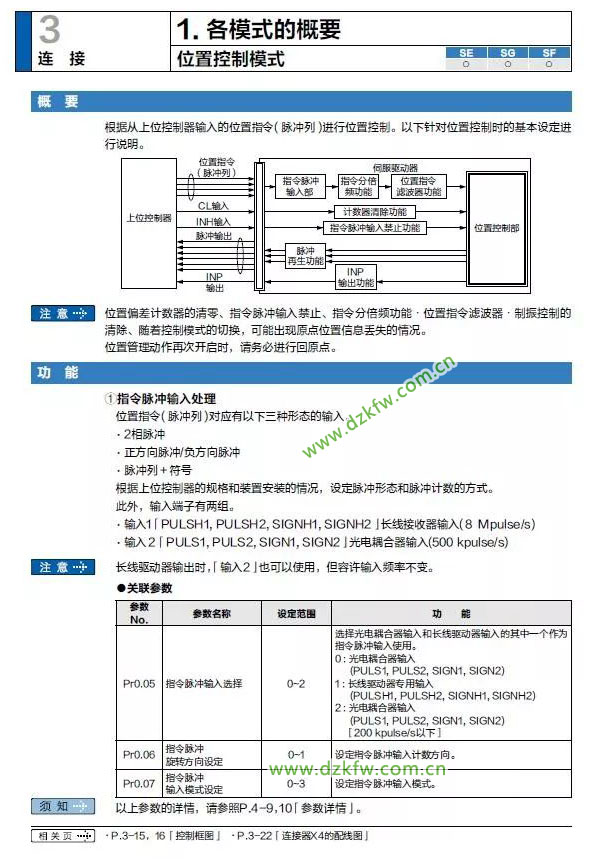
Ė∙ō■┐žųŲĘĮ╩ĮüĒšf╬ę┴╦ĮŌĄ─Ą─┐žųŲĘĮ╩Įę▓╩Ū┤¾¾wĄ─Ęųā╔ĘNŻ║
ę╗Īó ╗∙ė┌PLCĄ─▀\äė┐žųŲų„ę¬Ęųā╔┤¾▓┐ĘųŻ║1ĪóPLCŻ¼╣”─▄╩Ū░l╦═▀\äėĄ─├}ø_öĄŻ¼│õ«ö▀\äė┐žųŲĄ─░l╠¢╩®┴Ņš▀Ż¼╦┼Ę■ļŖÖC▀\äėĄĮ╩▓├┤╬╗ų├Ż¼╚½┐┐PLC░l╦═Ą─├}ø_öĄüĒøQČ©ĪŻ2Īó╦┼Ę■ļŖÖC║═╦┼Ę■“īäėŲ„Ż¼╦┼Ę■“īäėŲ„║═╦┼Ę■ļŖÖC┼õ╠ū×ķ▀\äė┐žųŲĄ─ł╠ąąÖCśŗ,Ė∙ō■Įė╩šĄĮĄ─├}ø_öĄ║═ĘĮŽ“▀\äėŽÓæ¬Ą─ŠÓļx
Č■Īó╗∙ė┌▀\äė┐žųŲ┐©Ą─▀\äė┐žųŲĘĮ╩Įę▓╩ŪĘųā╔┤¾▓┐ĘųŻ║1Īó▀\äė┐žųŲ┐©Ż¼╣”─▄╩Ū║═PLCę╗śėĄ─Ż¼│õ«ö▀\äė┐žųŲĄ─░l╠¢╩®┴Ņš▀Ż¼╦┼Ę■ļŖÖC▀\äėĄĮ╩▓├┤╬╗ų├Ż¼╚½┐┐▀\äė┐žųŲ┐©░l╦═Ą─├}ø_öĄüĒøQČ©ĪŻ2Īó╦┼Ę■ļŖÖC║═╦┼Ę■“īäėŲ„Ż¼╦┼Ę■“īäėŲ„║═╦┼Ę■ļŖÖC┼õ╠ū×ķ▀\äė┐žųŲĄ─ł╠ąąÖCśŗ,Ė∙ō■Įė╩šĄĮĄ─├}ø_öĄ║═ĘĮŽ“▀\äėŽÓæ¬Ą─ŠÓļxĪŻ
╬ęī”▀\┐ž┐žųŲ┐©Ą─蹊┐▒╚▌^╔┘Ż¼Ą½╩ŪĖ∙ō■╬ęéĆ╚╦Ą─┐┤Ę©Ż¼▀\äė┐žųŲ┐©ų„ę¬╩Ū╝»│╔┴╦ė▓╝■║═▄ø╝■Ż¼╦¹éāŽÓ▒╚ė┌PLCĖ³╚▌ęū┐žųŲČÓ▌SĄ─┐žųŲŻ¼ę╗░Ń▀\äė┐žųŲ┐©Ą─ÅS╝ęČ╝ęčĮøŠÄīæ║├Ą─║»öĄŻ¼╬ęéāų╗ąĶę¬Ė∙ō■║»öĄĄ─╣”─▄╚źš{ė├Š═║├┴╦ĪŻ▒Š╬─ų„ę¬╩ŪųvĮŌPLC║═╦┼Ę■“īäė┤ŅĮ©Ą─▀\äė┐žųŲĪŻ
╩ūŽ╚╬ęéā┴╦ĮŌę╗Ž┬╦┼Ę■“īäėŲ„Ą─ĮėŠĆŻ¼┴╦ĮŌę╗Ž┬▀\äė┐žųŲČ╝ąĶę¬──ą®ą┼╠¢ĪŻ
╦╔Ž┬šf├„Ģ°Ą─╬╗ų├┐žųŲ
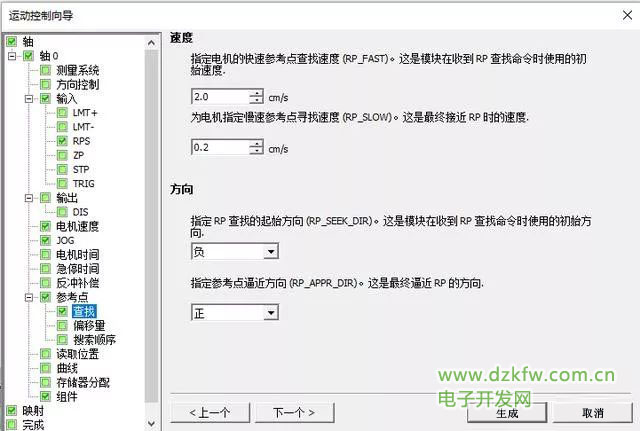
▀@└’ų„ę¬╩Ūīæ┴╦╬╗ų├┐žųŲŽ┬Ą─ĻPµIģóöĄŻ¼▀@ą®ę¬ūóęŌę╗Ž┬ĻPµIģóöĄŻ¼ģóöĄ▓╗ę╗śėĮėŠĆĘĮ╩Įę▓ę¬Ė·ų°ūāōQĪŻ

pr008Ż¼ļŖÖC▐Dę╗╚”╦∙ąĶꬥ─├}ø_öĄ
▀@└’įOų├Ą─PR0.08šfĄ─╩Ū╦┼Ę■“īäėŲ„▐Dę╗╚”Ż¼PLC╗“š▀▀\äė┐žųŲ┐©░l╦═ČÓ╔┘éĆ├}ø_Ż¼╦┼Ę■“īäėŲ„┐žųŲ╦┼Ę■ļŖÖC▐Dę╗╚”ĪŻ▀@éĆģóöĄ║▄ųžę¬Ż¼▀@éĆģóöĄę¬║═PLC╔ŽĄ─ĮMæB│╠ą“ę¬ī”æ¬║├Ż¼▓╗╚╗┐žųŲĢ■│÷¼FŲ½▓ŅĪŻ▓╗═¼Ą─“īäėŲ„ŲĘ┼ŲĄ─ų„ę¬ģóöĄČ╝▓Ņ▓╗ČÓŻ¼▀@éĆę¬Ė∙ō■Š▀¾wĄ─šf├„Ģ°üĒįOų├ĪŻ
“īäėļŖÖCĄ─ĮėŠĆ
▀@└’ų„꬚fĄ─ÄūéĆIOŻ¼├}ø_Īó╦┼Ę■╩╣─▄Īóäx▄ćĪó▀Ćėąā╔éĆš²žōśOŽ▐ĪŻ▀@╩Ūę╗éĆ╗∙▒ŠĄ─▀\äė┐žųŲąĶꬥ─ĮėŠĆĪŻę▓Š═╩Ūšfį┌PLCČ╦╬ęéāąĶę¬▀@├┤ČÓéĆ▌ö│÷Įo╦┼Ę■“īäėŲ„Ż¼š²žōśOŽ▐┐╔ęį▓╗ąĶę¬PLC▌ö│÷Ż¼ų▒ĮėĮėĄ─Ž▐╬╗ķ_ĻPŠ═║├ĪŻ
╦┼Ę■“īäėŲ„▀@▀ģ╗∙▒ŠĮėŠĆ║═ų„ę¬ģóöĄįOų├Š═▀@├┤ČÓŻ¼ĮėŽ┬üĒ╬ęéā┐╔ęį┐┤ę╗Ž┬╬„ķTūėPLC╔Žę¬╚ń║╬ĮMæBüĒ┼õų├ŽÓæ¬Ą─┐žųŲ│╠ą“ĪŻ┤¾Ė┼Ą─┴╦ĮŌę╗Ž┬▀\äė┐žųŲĄ─╣żū„įŁ└ĒĪŻį┌Ž┬ę╗╣Ø╬ę▓┼īóĄĮį§├┤į┌PLC╔ŽŠÄ│╠╚ź┐žųŲļŖÖCĄ─▀\äėĪŻ
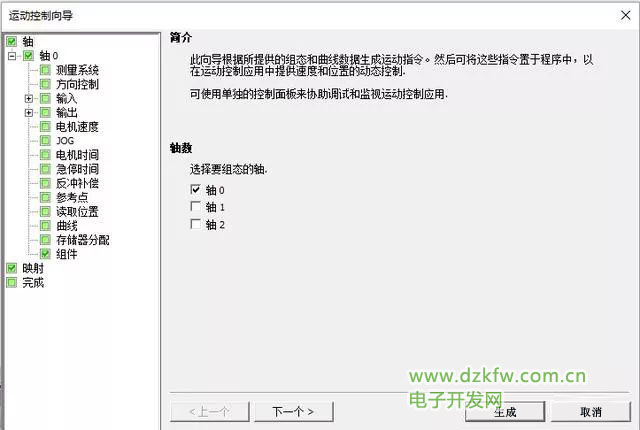
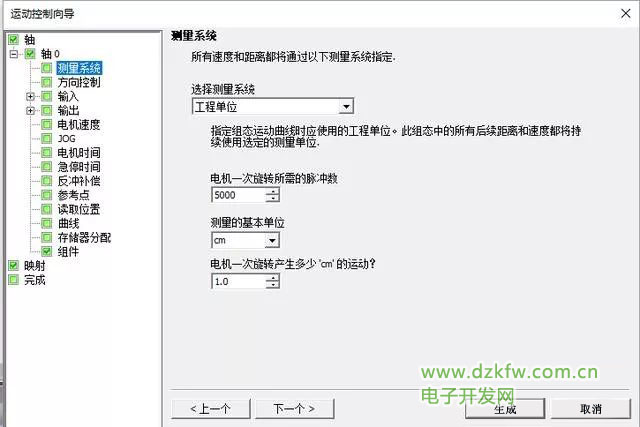
╬„ķTūėsmart 200Ą─ŠÄ│╠▄ø╝■STEP 7-MicroWIN SMART³cō¶Ž“ī¦Ż¼╦³Ģ■Ħų°─Ń┼õų├▀\┐ž┐žųŲ╦∙ąĶꬥ─ģóöĄŻ¼║å╗»ŠÄ│╠ĪŻ
1Īó į┌Ž“ī¦ųą³cō¶▀\äėŻ¼ÅŚ│÷▀\äėĄ─Ž“ī¦ĪŻ

2Īó▀xō±ę¬ĮMæBĄ─▌SŻ¼Ė∙ō■PLCĄ─ą═╠¢▓╗ę╗śėŻ¼ę╗éĆPLC─▄┐žųŲĄ─▌SĄ─öĄ┴┐ę▓▓╗ę╗śėŻ¼╬ę▀@└’─▄ĮMæB╚²éĆ▌SŻ¼┤·▒Ē▀@éĆPLCūŅČÓ─▄═¼Ģr┐žųŲ╚²éĆ╦┼Ę■ļŖÖCĪŻ
3Īó▀xō±£y┴┐ŽĄĮyŻ¼▀@└’ļŖÖC▐Dę╗┤╬ąĶꬥ─├}ø_öĄę¬║═╦┼Ę■ļŖÖCĄ─╔ŽįOų├Ą─├}ø_öĄę¬ę╗ų┬ĪŻ
ļŖÖC▐Dę╗┤╬«a╔·ČÓ╔┘╬╗ęŲ▀@éĆŠ═ę¬┐┤─ŃĄ─▀\äė┐žųŲŽĄĮyĄ─ĮzĖ▄╗“š▀╦┼Ę■ĖūĄ─ī¦│╠Ż¼▒╚╚ń┼cī¦│╠╩Ū10Ą─╦┼Ę■ĖūŻ¼─Ū├┤ļŖÖC▐Dę╗┤╬Š═ęŲäė1cm,▀@éĆ┐┤īŹļHĄ─ŪķørČ°Č©ĪŻ
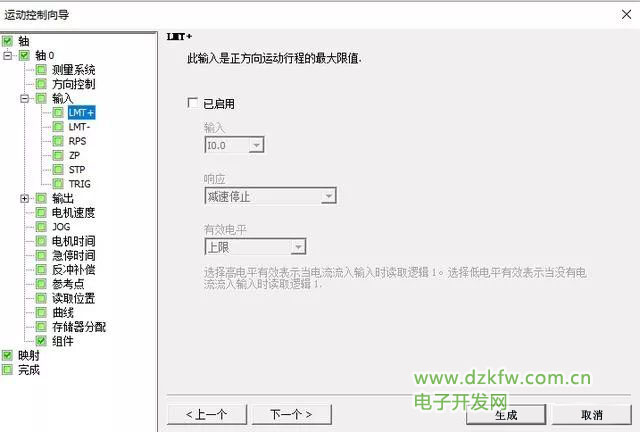
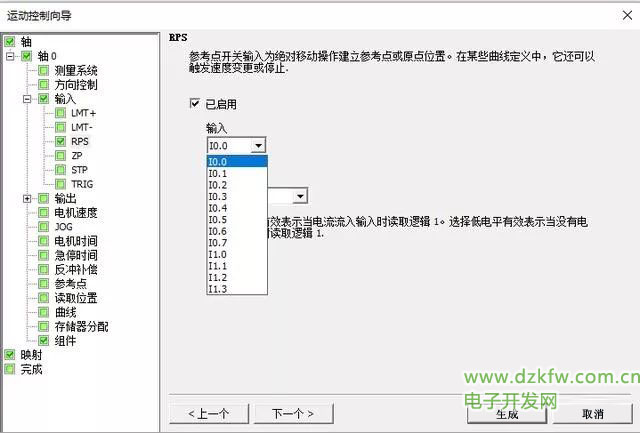
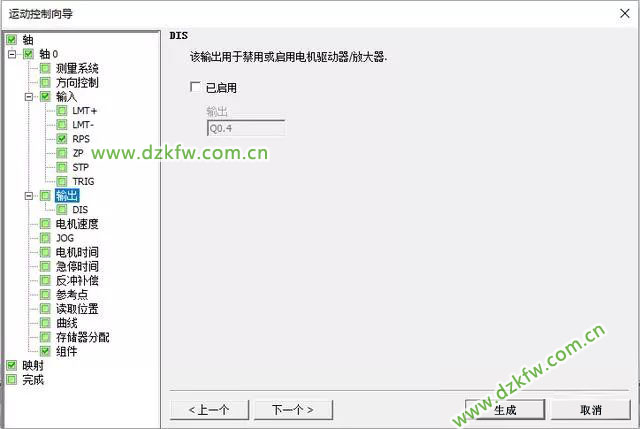
4Īó▌ö╚ļ┼õų├Ż¼▀@└’ų„ę¬╩Ū╚²éĆģóöĄę¬┼õų├Ż¼╔ŽśOŽ▐║═Ž┬śOŽ▐Ż¼▀@╩Ū┼ąöÓ▀\äė┐žųŲĄ─śOŽ▐╬╗ų├Ż¼▀ĆėąŠ═╩Ūģó┐╝³cŻ©╬ęéā│ŻšfĄ─┴Ń³cŻ®ĪŻ▀@╚²éĆ┐╔ęįūįė╔┤Ņ┼õ▌ö╚ļ³cŻ¼╬ęĮ©ūhę╗éĆŽĄĮyūŅ╔┘╩ŪąĶę¬╚²éĆŽ▐╬╗ķ_ĻPŻ¼ę╗éĆ╩Ū╔ŽśOŽ▐Ż¼ę╗éĆ╩ŪŽ┬śOŽ▐Ż¼▀Ćėąę╗éĆŠ═╩ŪįŁ³cĪŻĄ½╩Ū▀\äė┐žųŲūŅ╔┘ų╗ąĶę¬ę╗éĆ³cŠ═┐╔ęįīŹ¼F╬╗ų├┐žųŲŻ¼─ŪŠ═╩ŪįŁ³cĪŻĄ½╩Ū▀@śėĢ■│÷¼F┼▄│÷śOŽ▐Ą─╬ŻļUĪŻūŅ═Ļ╔ŲĄ─▀\äė┐žųŲæ¬įō╩Ūėą╬ÕéĆŻ¼ā╔éĆ╔ŽśOŽ▐Ż¼ā╔éĆŽ┬śOŽ▐═Ō╝ėę╗éĆįŁ³cĪŻā╔éĆ╔ŽśOŽ▐ę╗éĆĮėPLCę╗éĆĮė╦┼Ę■“īäėŲ„Ż¼ā╔éĆŽ┬śOŽ▐ę╗éĆĮėPLCę╗éĆĮė╦┼Ę■“īäėŲ„Ż¼▀ĆėąūŅ║¾ę╗éĆįŁ³cĮėPLCĪŻĄ½╩Ū▀@śėĢ■į÷╝ė│╔▒ŠŻ¼╦∙ęį╬ęéāę╗éĆė├╚²éĆŽ▐╬╗ķ_ĻPŠ═ē“┴╦
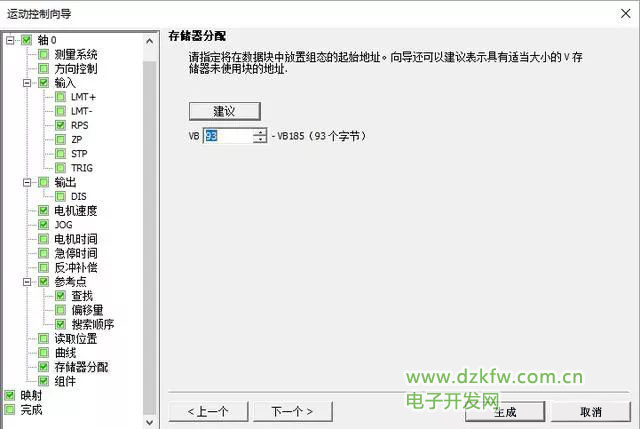
5Īó┼õų├Ž▐╬╗ķ_ĻPĄ─³c╬╗║═▌ö╚ļą┼╠¢ĪŻ
6ĪóĘĮŽ“▌ö│÷Ż¼▀@éĆ╩Ū┐žųŲĘĮŽ“▌ö│÷┐žųŲĄ─ĪŻ
7Īóģó┐╝³cĄ─┼õų├Ż¼┼õų├╗žÜwįŁ³cĄ─╦┘Č╚║═įŁ³cą┼╠¢
9Īó╦č╦„įŁ³cĄ─ĘĮ╩Į
10Īóā”┤µŲ„Ą─Ęų┼õ
11Īó┼õų├═Ļ│╔Ą─ĮY╣¹

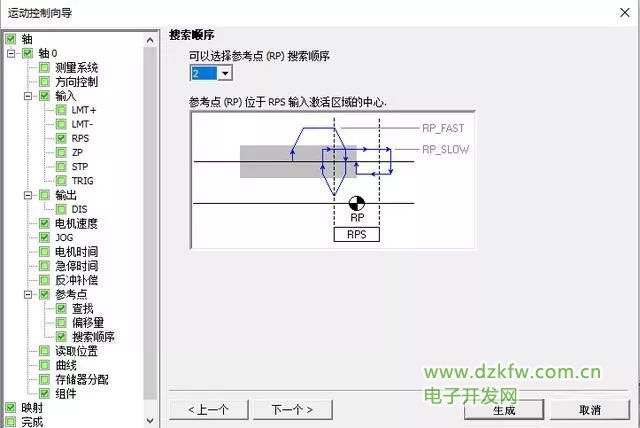
¼Fį┌┐éĮYę╗Ž┬ę╗éĆ▀\äė┐žųŲŽĄĮyų„ꬹĶę¬──ÄūéĆģóöĄŻ║1Īó┐žųŲŽĄĮyĄ─ī¦│╠ĪŻ2Īó╦┼Ę■ļŖÖC▐Dę╗╚”ąĶꬥ─├}ø_öĄŻ©PLC║═╦┼Ę■“īäėŲ„╔ŽĄ─ģóöĄįOų├ę¬ę╗ų┬Ż®ĪŻ3ĪóįŁ³cŽ▐╬╗ķ_ĻPĪŻ4Īó╔ŽśOŽ▐ķ_ĻPĪŻ5ĪóŽ┬śOŽ▐ķ_ĻPĪŻ
į┌╬ęéāš{įćų«Ū░ę╗Č©ę¬┤_Č©▀@├┤ÄūéĆģóöĄ▓┼─▄ē“ū÷ĄĮ╬╗ų├┐žųŲŻ¼Ž┬ę╗Ų¬╬─š┬╬ę▓┼Ģ■īóPLCĄ─ÄūéĆ▀\äė┐žųŲųĖ┴ŅĪŻ
┴¶čį╠Ä┤¾╝ę┐╔ęįča│õ╬─š┬ĮŌßī▓╗ī”╗“ŪĘ╚▒Ą─▓┐ĘųŻ¼▀@śėŽ┬ę╗éĆ┐┤ĄĮĄ─╚╦Ģ■īWĄĮĖ³ČÓŻ¼─Ńų¬Ą└Ą─š²╩Ū┤¾╝ęąĶꬥ─ĪŻĪŻĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū