
▓Į▀M(j©¼n)ļŖÖC(j©®)║═╦┼Ę■ļŖÖC(j©®)Ż¼▓╗═¼ė┌╚²ŽÓ«É▓ĮļŖÖC(j©®)Ż¼╦³éāĄ─ų„ę¬ū„ė├╩Ūė├ū„Č©╬╗ĪŻę▓Š═╩ŪŠ½┤_Ą─┤_Č©╣ż╝■Ą─╬╗ų├ĪŻ▓Į▀M(j©¼n)ļŖÖC(j©®) ║═╦┼Ę■ļŖÖC(j©®)Ą─▀xą═Ż¼▒žĒÜėąļŖÜŌ╚╦åT║═ĮY(ji©”)śŗ(g©░u)╚╦åTęį╝░╣ż╦ć╚╦åT╣▓═¼┤_Č©ĪŻė╔ė┌╦┼Ę■ļŖÖC(j©®)▒╚▓Į▀M(j©¼n)ļŖÖC(j©®)ār(ji©ż)Ė±Īóąį─▄Č╝ę¬Ė▀Ż¼ę“┤╦Ż¼▒žĒÜĖ∙ō■(j©┤)īŹ(sh©¬)ļHĄ─ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)Ż¼╣ż╦ćöĄ(sh©┤)ō■(j©┤)ęį╝░┐žųŲŽĄĮy(t©»ng)Ż¼▀xō±ąįār(ji©ż)▒╚ūŅĖ▀Ą─ĘĮ░ĖĪŻę▓Š═╩ŪŻ¼į┌ØMūŃąĶŪ¾Ą─Ū░╠ߎ┬Ż¼į┌▒ŻūC┐╔┐┐Ą─ŪķørŽ┬Ż¼ĮĄĄ═│╔▒ŠĪŻ
-
1ĪóĖ∙ō■(j©┤)▌SöĄ(sh©┤)┤_Č©
▀@╩Ū▀xō±▓Į▀M(j©¼n)▀Ć╩Ū╦┼Ę■Ą─ūŅ╗∙▒ŠįŁätŻ¼ę▓╩ŪūŅ╚▌ęū▒╗║÷┬įĄ─ĪŻī”ė┌╦┼Ę■üĒšfŻ¼ė╔├}ø_║══©ą┼ā╔ĘN┐žųŲĘĮ╩ĮŻ¼Č°▓Į▀M(j©¼n)ų╗ėą├}ø_┐žųŲĘĮ╩ĮĪŻę“┤╦Ż¼«ö(d©Īng)┐žųŲ▌SöĄ(sh©┤)║▄ČÓĢrŻ¼▒M┴┐▀xō±╦┼Ę■Ż¼▓╔ė├═©ą┼┐žųŲŻ¼▀@śėŻ¼¤ošō╩ŪŪ░Ų┌╩®╣żŻ¼▀Ć╩Ū║¾Ų┌ŠSūo(h©┤)Č╝ĘŪ│ŻĘĮ▒ŃĪŻę╗░Ń╦─▌SŻ¼ūŅČÓ┴∙▌Sęįā╚(n©©i)Ż¼Č╝▓╔ė├├}ø_┐žųŲĪŻČ°Ūę¼F(xi©żn)į┌PLC╗∙▒ŠČ╝ś╦(bi©Īo)┼õ╦─▌SĖ▀╦┘▌ö│÷Ż¼▒╚╚ń╚²┴ŌFX5UŻ¼╬„ķTūėS7-1200Ż¼ÜW─Ę²łCP1HĄ╚Ą╚ĪŻ

-
2ĪóĖ∙ō■(j©┤)╣Ø(ji©”)┼─┤_Č©
įōę“╦ž╩ŪĻP(gu©Īn)µIŻ¼ė╔ė┌╦┼Ę■║═▓Į▀M(j©¼n)Ą─ūį╔Ē╠ž³c(di©Żn)Ż¼ī¦(d©Żo)ų┬╦³éāį┌æ¬(y©®ng)ė├╔ŽĄ─▓Ņ«ÉĪŻ▓Į▀M(j©¼n)Ą─╝ė╦┘Ģrķgį┌0.3ĄĮ0.5├ļų«ķgŻ¼Č°╦┼Ę■Ą─╝ė╦┘Ģrķgų╗ėąÄū║┴├ļĪŻ▀@ą®Ģrķg▓Ņ«Éī”ė┌╚╦ŅÉüĒšfŻ¼Äū║§ø]ģ^(q©▒)äeŻ¼Ą½ī”ūįäė╗»įO(sh©©)éõüĒšf┤_īŹ(sh©¬)ų┴ĻP(gu©Īn)ųžę¬ĪŻ╦³ī”įO(sh©©)éõĄ─š¹¾w╣Ø(ji©”)┼─Ż¼ėąų°ų┴ĻP(gu©Īn)ųžę¬Ą─ė░ĒæĪŻąĪ╣”┬╩Ą─╚šŽĄ╦┼Ę■Ż¼Ņ~Č©▐D(zhu©Żn)╦┘3000r/minŻ¼ųą┤¾╣”┬╩Ą─╦┼Ę■Ż¼Ņ~Č©▐D(zhu©Żn)╦┘į┌1500ĄĮ2000r/minĪŻČ°śOąĪæT┴┐Ą─ÜWŽĄ╦┼Ę■Ż¼ŲõŅ~Č©▐D(zhu©Żn)╦┘┐╔ęįĄĮ▀_(d©ó)5000r/minŻ¼╔§ų┴9000r/minĪŻČ°▓Į▀M(j©¼n)ę╗░Ńį┌500r/minū¾ėęĪŻį┘╝ė╔ŽÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)Ą─ė░ĒæŻ¼╦∙ęįŻ¼▀xō±▓Į▀M(j©¼n)▀Ć╩Ū╦┼Ę■Ż¼ų▒ĮėøQČ©┴╦įO(sh©©)éõĄ─╣Ø(ji©”)┼─ĪŻ
-
3ĪóĖ∙ō■(j©┤)┐žųŲŠ½Č╚┤_Č©
▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▓ĮŠÓĮŪ╩Ūųžę¬Ą─ę“╦žŻ¼╦³ų▒ĮėøQČ©┴╦▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─Š½Č╚ĪŻ▒╚╚ń▓ĮŠÓĮŪ0.18Č╚Ą─▓Į▀M(j©¼n)ļŖÖC(j©®)Ż¼ĮoČ©ę╗éĆ├}ø_Ż¼╦³Š═Ū░▀M(j©¼n)0.18Č╚ĪŻ▀@Š═╩Ū╦³╦∙─▄▀_(d©ó)ĄĮĄ─ūŅĄ═Š½Č╚ĪŻę“?y©żn)ķ▓╗┐╔─▄ėą░ļéĆ├}ø_ĪŻĄ½╩ŪŻ¼▓Į▀M(j©¼n)Č╝ų¦│ų╝Ü(x©¼)ĘųŻ¼▓╔ė├Ė„ĘN╦ŃĘ©Ż¼ūī╦³Ą─Š½Č╚ŠÄ│╠0.018Č╚╗“╩ŪŲõ╦³öĄ(sh©┤)ųĄŻ¼Ą½╩Ū▓╗─▄¤oŽ▐ųŲ╝Ü(x©¼)ĘųĪŻČ°╦┼Ę■ļŖÖC(j©®)Ą─Š½Č╚Ż¼╩Ūė╔╦³Ą─ŠÄ┤aŲ„øQČ©Ą─ĪŻ▒╚╚ńŻ¼¼F(xi©żn)į┌ų„┴„Ą─╚šŽĄ╦┼Ę■Ż¼ŲõŠÄ┤aŲ„╩Ū21╬╗Ż¼╔§ų┴22╬╗ĪŻ21╬╗Ż¼ę▓Š═╩ŪŠÄ┤aŲ„Ą─Š½Č╚2^21Ż¼░č360Č╚Ą╚Ęų│╔2097152Ę▌Ż¼Š½Č╚ęčĮø(j©®ng)ŽÓ«ö(d©Īng)Ė▀┴╦ĪŻ▀@ą®Ż¼āHāH╩ŪļŖÖC(j©®)─▄▀_(d©ó)ĄĮĄ─Š½Č╚Ż¼▀Ćę¬┐╝æ]ÖC(j©®)ąĄĄ─Š½Č╚Ż¼▒╚╚ń£p╦┘ÖC(j©®)Ą─Ę┤Ž“ķgŽČŻ¼ĮzĖ▄Ą─░▓čb║═╝ė╣żŠ½Č╚Ą╚Ą╚ĪŻę╗░ŃšfüĒŻ¼¤ošō╩Ū▓Į▀M(j©¼n)▀Ć╩Ū╦┼Ę■Ż¼Č╝─▄īŹ(sh©¬)¼F(xi©żn)0.1║┴├ūĄ─īŹ(sh©¬)ļHŠ½Č╚ĪŻ
-
4ĪóĖ∙ō■(j©┤)╩╣ė├ł÷║Ž┤_Č©
ų„ę¬╩Ūį┌ę╗ą®╠ž╩Ōł÷║ŽŻ¼ė╔ė┌▓Į▀M(j©¼n)ļŖÖC(j©®)┐╔ęįū÷Ą─Ė³ąĪŻ¼į┌ę╗ą®┐šķg¬MšŁĄ─ł÷║ŽŻ¼ąĶę¬╩╣ė├▓Į▀M(j©¼n)ļŖÖC(j©®)ĪŻ╦┼Ę■ļŖÖC(j©®)ūŅąĪĄ─×ķ200WŻ¼éĆäeŲĘ┼Ųėą100WĄ─«a(ch©Żn)ŲĘŻ¼ļm╚╗¾wĘe▒╚▌^ąĪŻ¼Ą½╩Ūį┌ŽÓ═¼┼żŠž▌ö│÷Ž┬Ż¼▓Į▀M(j©¼n)ļŖÖC(j©®)┐╔ęįū÷Ą─Ė³ąĪĪŻė╔ė┌▓Į▀M(j©¼n)║═╦┼Ę■Ą─▓Ņ«ÉŻ¼ę╗░ŃšfüĒŻ¼╦┼Ę■ļŖÖC(j©®)▌ö│÷Č╦Č╝╩Ūį÷╝ė£p╦┘ÖC(j©®)śŗ(g©░u)Ż¼Č°▓Į▀M(j©¼n)ļŖÖC(j©®)ę╗░Ń╩Ūų▒Įė▌ö│÷ĪŻ
-
5ĪóĖ∙ō■(j©┤)ŅA(y©┤)╦Ń
ŽÓī”ė┌╦┼Ę■ļŖÖC(j©®)üĒšfŻ¼▓Į▀M(j©¼n)ļŖÖC(j©®)ār(ji©ż)Ė±Ą═┴«Ż¼ę“┤╦į┌ØMūŃąĶŪ¾Ą─Ū░╠ߎ┬Ż¼æ¬(y©®ng)įō▒M┐╔─▄╩╣ė├▓Į▀M(j©¼n)ĪŻ«ö(d©Īng)╚╗Ż¼╚ń╣¹ę╗╬ČūĘŪ¾ār(ji©ż)Ė±Ż¼Č°║÷ęĢąĶŪ¾Ż¼─Ū├┤Ż¼▀xė├▓Į▀M(j©¼n)╣Ø(ji©”)╩ĪĄ─│╔▒ŠŻ¼▀Ć▓╗ē“¼F(xi©żn)ł÷│÷å¢Ņ}Ą─Ė„ĘN┘M(f©©i)ė├ĪŻ
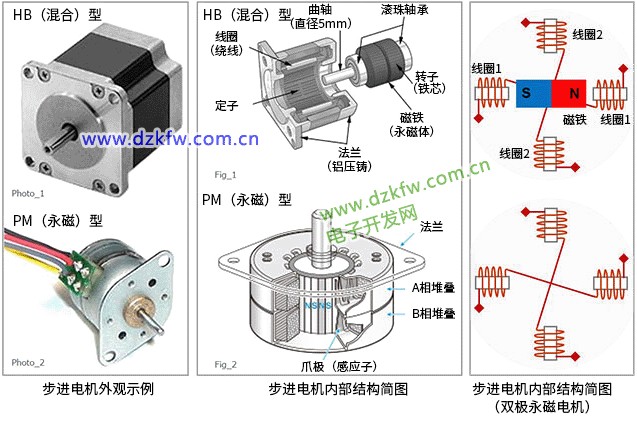
▓Į▀M(j©¼n)ļŖÖC(j©®)ų¬ūRöU(ku©░)š╣Ż║▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─ŽÓöĄ(sh©┤)Ż║╩ŪųĖļŖÖC(j©®)ā╚(n©©i)▓┐Ą─ŠĆ╚”ĮMöĄ(sh©┤)Ż¼─┐Ū░│Żė├Ą─ėąČ■ŽÓĪó╚²ŽÓĪó╦─ŽÓĪó╬ÕŽÓ▓Į▀M(j©¼n)ļŖÖC(j©®)ĪŻļŖÖC(j©®)ŽÓöĄ(sh©┤)▓╗═¼Ż¼Ųõ▓ĮŠÓĮŪę▓▓╗═¼Ż¼ę╗░ŃČ■ŽÓļŖÖC(j©®)Ą─▓ĮŠÓĮŪ×ķ0.9ĪŃ/1.8ĪŃĪó╚²ŽÓĄ─×ķ0.75ĪŃ/1.5ĪŃĪó╬ÕŽÓĄ─×ķ0.36ĪŃ/0.72ĪŃ ĪŻ
▒Ż│ų▐D(zhu©Żn)ŠžŻ║╩ŪųĖ▓Į▀M(j©¼n)ļŖÖC(j©®)═©ļŖĄ½ø]ėą▐D(zhu©Żn)äėĢrŻ¼Č©ūėµiūĪ▐D(zhu©Żn)ūėĄ─┴”ŠžĪŻ╦³╩Ū▓Į▀M(j©¼n)ļŖÖC(j©®)ūŅųžę¬Ą─ģóöĄ(sh©┤)ų«ę╗Ż¼═©│Ż▓Į▀M(j©¼n)ļŖÖC(j©®)į┌Ą═╦┘ĢrĄ─┴”ŠžĮėĮ³▒Ż│ų▐D(zhu©Żn)ŠžĪŻ
ŽÓöĄ(sh©┤)Ż║«a(ch©Żn)╔·▓╗═¼ī”śONĪóS┤┼ł÷Ą─╝ż┤┼ŠĆ╚”ī”öĄ(sh©┤)Ż¼╩ŪųĖļŖÖC(j©®)ā╚(n©©i)▓┐Ą─ŠĆ╚”ĮMöĄ(sh©┤)Ż¼─┐Ū░│Żė├Ą─ėąČ■ŽÓĪó╚²ŽÓĪó╦─ŽÓĪó╬ÕŽÓ▓Į▀M(j©¼n)ļŖÖC(j©®)ĪŻļŖÖC(j©®)ŽÓöĄ(sh©┤)▓╗═¼Ż¼Ųõ▓ĮŠÓĮŪę▓▓╗═¼Ż¼ę╗░ŃČ■ŽÓļŖÖC(j©®)Ą─▓ĮŠÓĮŪ×ķ0.9ĪŃ/1.8ĪŃĪó╚²ŽÓĄ─×ķ0.75ĪŃ/1.5ĪŃĪó╬ÕŽÓĄ─×ķ0.36ĪŃ/0.72ĪŃ ĪŻį┌ø]ėą╝Ü(x©¼)Ęų“ī(q©▒)äėŲ„ĢrŻ¼ė├æ¶ų„ę¬┐┐▀xō±▓╗═¼ŽÓöĄ(sh©┤)Ą─▓Į▀M(j©¼n)ļŖÖC(j©®)üĒØMūŃūį╝║▓ĮŠÓĮŪĄ─ę¬Ū¾ĪŻ╚ń╣¹╩╣ė├╝Ü(x©¼)Ęų“ī(q©▒)äėŲ„Ż¼ätĪ«ŽÓöĄ(sh©┤)Ī»īóūāĄ├ø]ėąęŌ┴xŻ¼ė├æ¶ų╗ąĶį┌“ī(q©▒)äėŲ„╔ŽĖ─ūā╝Ü(x©¼)Ęų?j©½n)?sh©┤)Ż¼Š═┐╔ęįĖ─ūā▓ĮŠÓĮŪĪŻ─┐Ū░æ¬(y©®ng)ė├ūŅÅVĘ║Ą─╩Ūā╔ŽÓ║═╦─ŽÓŻ¼╦─ŽÓļŖÖC(j©®)ę╗░Ńė├ū„ā╔ŽÓŻ¼╬ÕŽÓĄ─│╔▒Š▌^Ė▀ĪŻ
┼─öĄ(sh©┤)Ż║═Ļ│╔ę╗éĆ┤┼ł÷ų▄Ų┌ąįūā╗»╦∙ąĶ├}ø_öĄ(sh©┤)╗“?q©▒)¦ļŖĀŅæB(t©żi)ė├n▒Ē╩ŠŻ¼╗“ųĖļŖÖC(j©®)▐D(zhu©Żn)▀^ę╗éĆ²XŠÓĮŪ╦∙ąĶ├}ø_öĄ(sh©┤)Ż¼ęį╦─ŽÓļŖÖC(j©®)×ķ└²Ż¼ėą╦─ŽÓ╦─┼─▀\(y©┤n)ąąĘĮ╩Į╝┤AB-BC-CD-DA-ABŻ¼╦─ŽÓ░╦┼─▀\(y©┤n)ąąĘĮ╩Į╝┤ A-AB-B-BC-C-CD-D-DA-A.
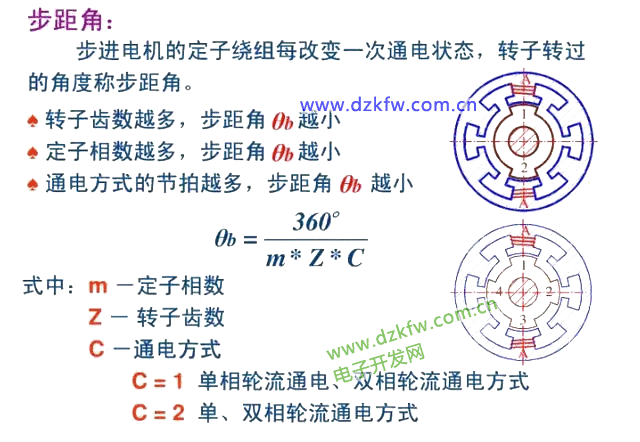
╣╠ėą▓ĮŠÓĮŪŻ║ī”æ¬(y©®ng)ę╗éĆ├}ø_ą┼╠¢Ż¼ļŖÖC(j©®)▐D(zhu©Żn)ūė▐D(zhu©Żn)▀^Ą─ĮŪ╬╗ęŲė├”╚▒Ē╩ŠĪŻ”╚=360Č╚Ż©▐D(zhu©Żn)ūė²XöĄ(sh©┤)J*▀\(y©┤n)ąą┼─öĄ(sh©┤)Ż®Ż¼ęį│ŻęÄ(gu©®)Č■Īó╦─ŽÓŻ¼▐D(zhu©Żn)ūė²X×ķ50²XļŖÖC(j©®)×ķ└²ĪŻ╦─┼─▀\(y©┤n)ąąĢr▓ĮŠÓĮŪ×ķ”╚=360Č╚/Ż©50*4Ż®=1.8Č╚Ż©╦ūĘQš¹▓ĮŻ®Ż¼░╦┼─▀\(y©┤n)ąąĢr▓ĮŠÓĮŪ×ķ”╚=360Č╚/Ż©50*8Ż®=0.9Č╚Ż©╦ūĘQ░ļ▓ĮŻ®ĪŻ▀@éĆ▓ĮŠÓĮŪ┐╔ęįĘQų«×ķĪ«ļŖÖC(j©®)╣╠ėą▓ĮŠÓĮŪĪ»Ż¼╦³▓╗ę╗Č©╩ŪļŖÖC(j©®)īŹ(sh©¬)ļH╣żū„ĢrĄ─šµš²▓ĮŠÓĮŪŻ¼šµš²Ą─▓ĮŠÓĮŪ║═“ī(q©▒)äėŲ„ėąĻP(gu©Īn)ĪŻ
Č©╬╗▐D(zhu©Żn)ŠžŻ©DETENT TORQUEŻ®Ż║ļŖÖC(j©®)į┌▓╗═©ļŖĀŅæB(t©żi)Ž┬Ż¼ļŖÖC(j©®)▐D(zhu©Żn)ūėūį╔ĒĄ─µiČ©┴”ŠžŻ©ė╔┤┼ł÷²Xą╬Ą─ųC▓©ęį╝░ÖC(j©®)ąĄš`▓Ņįņ│╔Ą─Ż®Ż¼DETENT TORQUE į┌ć°ā╚(n©©i)ø]ėąĮy(t©»ng)ę╗Ą─ĘŁūgĘĮ╩ĮŻ¼╚▌ęū╩╣┤¾╝ę«a(ch©Żn)╔·š`ĮŌŻ╗ė╔ė┌Ę┤æ¬(y©®ng)╩Į▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▐D(zhu©Żn)ūė▓╗╩Ūė└┤┼▓─┴ŽŻ¼╦∙ęį╦³ø]ėąDETENT TORQUEĪŻ
ūŅ┤¾ņo▐D(zhu©Żn)ŠžŻ║ę▓Įą▒Ż│ų▐D(zhu©Żn)ŠžŻ©HOLDING TORQUEŻ®Ż¼ļŖÖC(j©®)į┌Ņ~Č©ņoæB(t©żi)ļŖū„ė├Ž┬Ż©═©ļŖŻ®Ż¼ļŖÖC(j©®)▓╗ū„ą²▐D(zhu©Żn)▀\(y©┤n)äėĢrŻ¼ļŖÖC(j©®)▐D(zhu©Żn)▌SĄ─µiČ©┴”ŠžŻ¼╝┤Č©ūėµiūĪ▐D(zhu©Żn)ūėĄ─┴”ŠžĪŻ┤╦┴”Šž╩Ū║Ō┴┐ļŖÖC(j©®)¾wĘeŻ©Äū║╬│▀┤ńŻ®Ą─ś╦(bi©Īo)£╩(zh©│n)Ż¼┼c“ī(q©▒)äėļŖē║╝░“ī(q©▒)äėļŖį┤Ą╚¤oĻP(gu©Īn)ĪŻ═©│Ż▓Į▀M(j©¼n)ļŖÖC(j©®)į┌Ą═╦┘ĢrĄ─┴”ŠžĮėĮ³▒Ż│ų▐D(zhu©Żn)ŠžĪŻė╔ė┌▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▌ö│÷┴”ŠžļS╦┘Č╚Ą─į÷┤¾Č°▓╗öÓ╦ź£pŻ¼▌ö│÷╣”┬╩ę▓ļS╦┘Č╚Ą─į÷┤¾Č°ūā╗»Ż¼╦∙ęį▒Ż│ų▐D(zhu©Żn)ŠžŠ═│╔×ķ┴╦║Ō┴┐▓Į▀M(j©¼n)ļŖÖC(j©®)ūŅųžę¬Ą─ģóöĄ(sh©┤)ų«ę╗ĪŻ▒╚╚ńŻ¼«ö(d©Īng)╚╦éāšf2N.mĄ─▓Į▀M(j©¼n)ļŖÖC(j©®)Ż¼į┌ø]ėą╠ž╩Ōšf├„Ą─ŪķørŽ┬╩ŪųĖ▒Ż│ų▐D(zhu©Żn)Šž×ķ2N.mĄ─▓Į▀M(j©¼n)ļŖÖC(j©®)ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū