
╗∙ĄA(ch©│)īŹ(sh©¬)ė├╚ļķTĄ─╬„ķTūėS7-200PLCīW(xu©”)┴Ģ(x©¬)╣Pėø
ę╗Īó▌ö╚ļą┼╠¢Ż║I0.0-I0.7; I1.0-I1.7
Č■Īó▌ö│÷ą┼╠¢Ż║Q0.0-Q0.7; Q1.0-Q1.5
╚²Īó└^ļŖŲ„Ż║M0.0-M31.7Ż╗╣▓256╬╗
╦─ĪóĢr(sh©¬)ķg└^ļŖŲ„Ż©Å─T37ķ_╩╝ŠÄŻ®Ż║═©ļŖčėĢr(sh©¬)Ż©TONŻ®
ėąėøæøĄ─═©ļŖčėĢr(sh©¬)Ż©TONRŻ®
öÓļŖčėĢr(sh©¬)Ż©TOFŻ®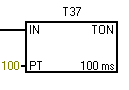
łD1
ęįłD1×ķ└²Ż¼IN×ķ▌ö╚ļą┼╠¢Ż¼TON▒Ē╩Š▀@éĆ(g©©)Ģr(sh©¬)ķg└^ļŖŲ„╩Ū═©ļŖčėĢr(sh©¬)Ż¼T37▒Ē╩Š▀@éĆ(g©©)└^ļŖŲ„├³├¹×ķT37Ż¼100ms╩Ūå╬╬╗╗∙öĄ(sh©┤)Ż¼ PT×ķčė▀tĢr(sh©¬)ķg
Ģr(sh©¬)ķg└^ļŖŲ„čė▀tĢr(sh©¬)ķg╦ŃĘ©Ż║PTĢr(sh©¬)ķgå╬╬╗╗∙öĄ(sh©┤)Ż╗łD1ųąčė▀tĢr(sh©¬)ķg×ķ100100ms=10000ms=10s
╬ÕĪóėŗ(j©¼)öĄ(sh©┤)Ų„Ż©C0-C255Ż®Ż║į÷ėŗ(j©¼)öĄ(sh©┤)Ų„Ż©CTUŻ®
£pėŗ(j©¼)öĄ(sh©┤)Ų„Ż©CTDŻ®
į÷£pėŗ(j©¼)öĄ(sh©┤)Ų„Ż©CTUDŻ®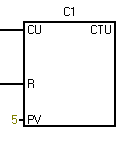
łD2
ęįłD2×ķ└²Ż¼C1▒Ē╩Š▀@éĆ(g©©)ėŗ(j©¼)Ģr(sh©¬)Ų„├³├¹×ķC1,CTU▒Ē╩Š▀@éĆ(g©©)ėŗ(j©¼)öĄ(sh©┤)Ų„×ķį÷ėŗ(j©¼)öĄ(sh©┤)Ų„Ż¼CU×ķė|░l(f©Ī)ą┼╠¢Ż¼R×ķÅ═(f©┤)╬╗ą┼╠¢Ż¼PV×ķėŗ(j©¼)öĄ(sh©┤)┤╬öĄ(sh©┤)
╠ß╩ŠŻ║1. ėŗ(j©¼)öĄ(sh©┤)Ų„CUČ╦┼cRČ╦▓╗─▄┤µį┌orĀŅæB(t©żi)
2.ėŗ(j©¼)öĄ(sh©┤)Ų„ę¬Å─ūŅū¾Č╦ų„ŠĆų▒Įė▌ö╚ļą┼╠¢
3.ę╗éĆ(g©©)ŠW(w©Żng)Įj(lu©░)└’ų╗─▄ėąę╗éĆ(g©©)ėŗ(j©¼)öĄ(sh©┤)Ų„
┴∙Īó╔Ž╔²čžŻ©PŻ®Ż║╔Ž╔²čžė|░l(f©Ī)Ż¼«ö(d©Īng)▌ö╚ļą┼╠¢ĀŅæB(t©żi)ė╔0Ī¬1ät░l(f©Ī)╔·äėū„Ż¼Ę┤ų«ė╔1Ī¬0ät▓╗äėū„
Ž┬ĮĄčžŻ©NŻ®Ż║Ž┬ĮĄčžė|░l(f©Ī)Ż¼«ö(d©Īng)▌ö╚ļą┼╠¢ĀŅæB(t©żi)ė╔1Ī¬0ät░l(f©Ī)╔·äėū„Ż¼Ę┤ų«ė╔0Ī¬1ät▓╗äėū„
Ų▀Īó╠ž╩Ō╣”─▄╝─┤µŲ„Ż©SMŻ®Ż║
SM0.0Ż║╩╣▀\(y©┤n)ąąĢr(sh©¬)ę╗ų▒×ķ1Ż¼╩Ū│ŻON└^ļŖŲ„Ż¼ę╗░Ńė├į┌│╠ą“ķ_╩╝ūŅū¾é╚(c©©)Ą┌ę╗╬╗ų├Ż¼▐kūC├┐┤╬Č╝Æ▀├ĶŻ╗
SM0.1:╩ŪCPUĄ┌ę╗┤╬╔ŽļŖ▀\(y©┤n)ąąĢr(sh©¬)äėū„ę╗┤╬Ż¼ę▓Š═╩Ūę╗éĆ(g©©)╔Ž╔²čžŻ¼ę╗░Ńū„×ķ│§╩╝╣╩šŽÅ═(f©┤)╬╗╩╣ė├Ż╗
SM0.2:«ö(d©Īng)ÖC(j©®)Ų„ł╠(zh©¬)ąąöĄ(sh©┤)īW(xu©”)▀\(y©┤n)╦ŃĮY(ji©”)╣¹×ķžō(f©┤)Ģr(sh©¬)Ż¼įō╬╗▒╗ų├1Ż╗
SM0.3:ķ_ÖC(j©®)║¾▀M(j©¼n)╚ļRUNĘĮ╩ĮŻ¼įō╬╗▒╗ų├1ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌Ż╗
SM0.4:╩Ūęį1min×ķų▄Ų┌Ą─├}ø_▓©ą╬Ż¼┐╔ęįū„×ķėŗ(j©¼)öĄ(sh©┤)Ų„ė|░l(f©Ī)╩╣ė├Ż╗
SM0.5:╩Ūęį1├ļ×ķų▄Ų┌Ą─├}ø_▓©ą╬Ż¼┐╔ęįū„×ķėŗ(j©¼)öĄ(sh©┤)Ų„ė|░l(f©Ī)╩╣ė├Ż╗
SM0.6:×ķÆ▀├ĶĢr(sh©¬)ńŖ├}ø_Ż¼╩ū┤╬Æ▀├Ķ×ķ1Ż¼Ž┬┤╬×ķ0Ż¼į┌Ž┬┤╬×ķ1Ż¼ęį┤╦ŅÉ═ŲŻ╗
SM1.0:«ö(d©Īng)ł╠(zh©¬)ąą─│ą®ųĖ┴ŅŻ¼ŲõĮY(ji©”)╣¹×ķ0Ģr(sh©¬)Ż¼īóĖ─╬╗ų├×ķ1Ż╗
SM1.1:«ö(d©Īng)ł╠(zh©¬)ąą─│ą®ųĖ┴ŅŻ¼ŲõĮY(ji©”)╣¹ęń│÷╗“ĘŪĘ©öĄ(sh©┤)ųĄĢr(sh©¬)Ż¼īóĖ─╬╗ų├×ķ1Ż╗
SM1.2:«ö(d©Īng)ł╠(zh©¬)ąąöĄ(sh©┤)īW(xu©”)▀\(y©┤n)╦ŃųĖ┴ŅŻ¼ŲõĮY(ji©”)╣¹×ķžō(f©┤)öĄ(sh©┤)Ģr(sh©¬)Ż¼īóĖ─╬╗ų├×ķ1Ż╗
SM1.3:įćłD│²ęį0Ģr(sh©¬)Ż¼īóĖ─╬╗ų├×ķ1ĪŻ
░╦ĪóĒśą“┐žųŲ└^ļŖŲ„(S):
Ēśą“┐žųŲ└^ļŖŲ„ģ^(q©▒)×ķĒśą“┐žųŲ└^ļŖŲ„Ą─öĄ(sh©┤)ō■(j©┤)Č°Į©┴óę╗éĆ(g©©)┤µā”ģ^(q©▒)Ż¼ė├S▒Ē╩ŠŻ╗┐╔ęį░┤╬╗Īóūų╣Ø(ji©”)ĪóūųĪóļpūų╦─ĘNĘĮ╩ĮüĒ┤µ╚ĪĪŻ
Ż©1Ż®╬╗Ż║S0.0-S31.7,╣▓256³c(di©Żn)
Ż©2Ż®ūų╣Ø(ji©”)Ż║SB0-SB31,╣▓32ūų╣Ø(ji©”)
Ż©3Ż®ūųŻ║SW0-SW30,╣▓16ūų
Ż©4Ż®ļpūųŻ║SD0-SD28,╣▓8éĆ(g©©)ļpūų
ūóŻ║│╠ą“ųąS╔ŽĘĮ╩Ūų├╬╗Ą─Ų╩╝╬╗ų├Ż¼Ž┬ĘĮĄ─öĄ(sh©┤)ūų╩ŪÅ─Ų╩╝╬╗ų├ķ_╩╝Ą─┐é³c(di©Żn)öĄ(sh©┤)Ż¼╚ńłD╚²▒Ē╩ŠÅ─Q0.0ķ_╩╝ų├╬╗╚²éĆ(g©©)³c(di©Żn)Ż©Q0.0,Q0.1,Q0.2Ż®Ż╗RĄ─╔ŽĘĮŽ┬ĘĮ▒Ē▀_(d©ó)ęŌ╦╝┼cSę╗śėĪŻ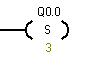
łD3
Š┼ĪóÅ═(f©┤)╬╗Ż©RŻ®Ż║ė├Ę©┼cĒśą“┐žųŲ└^ļŖŲ„ę╗śėŻ¼Ēśą“┐žųŲ└^ļŖŲ„╩Ūų├╬╗Ż¼R×ķÅ═(f©┤)╬╗ĪŻ
╩«Īó╠°▐D(zhu©Żn)ųĖ┴Ņ┼cś╦(bi©Īo)║×ųĖ┴Ņ
╠°▐D(zhu©Żn)ųĖ┴ŅŻ©JMPŻ®Ż║į┌ŅA(y©┤)ų├ė|░l(f©Ī)ą┼╠¢Įė═©Ģr(sh©¬)Ż¼╩╣│╠ą“╠°▐D(zhu©Żn)ĄĮś╦(bi©Īo)║×╠Äł╠(zh©¬)ąąŻ╗
ś╦(bi©Īo)║ׯ©LBLŻ®Ż║ś╦(bi©Īo)ėø╠°▐D(zhu©Żn)Ą──┐Ą─Ąž╬╗ų├Ż╗
JMP┼cLBLųĖ┴Ņ╔ŽĘĮĄ─öĄ(sh©┤)ūų×ķī”æ¬(y©®ng)Ą─╬╗ų├Ż¼╝┤«ö(d©Īng)JMPųĖ┴Ņ╔ŽĘĮöĄ(sh©┤)ūų×ķnĢr(sh©¬)Ż¼Įė═©Ģr(sh©¬)Ģ■ūįäė╠°▐D(zhu©Żn)ĄĮŽÓī”æ¬(y©®ng)Ą─╔ŽĘĮöĄ(sh©┤)ūų×ķnĄ─LBL├³┴ŅĄ─╬╗ų├üĒł╠(zh©¬)ąą│╠ą“Ż¼│Żė├üĒŪąōQā╔éĆ(g©©)▓╗═¼╣żū„ĀŅæB(t©żi)Ž┬Ą─▓╗═¼Ą─│╠ą“ĪŻ
╩«ę╗ĪóĖ▀╦┘ėŗ(j©¼)öĄ(sh©┤)Ų„Ż©HCŻ®
ė├üĒ└█Ęe▒╚CPUĄ─Æ▀├Ķ╦┘┬╩Ė³┐ņĄ─╩┬╝■Ż¼ėŗ(j©¼)öĄ(sh©┤)▀^│╠┼cÆ▀├Ķų▄Ų┌¤oĻP(gu©Īn)ĪŻ
╩«Č■Īó└█╝ėŲ„Ż©ACŻ®
ė├üĒŽ“ūė│╠ą“é„▀fģóöĄ(sh©┤)║═Å─ūė│╠ą“ĘĄ╗žģóöĄ(sh©┤)Ż¼╗“ė├üĒ┼RĢr(sh©¬)▒Ż┤µųąķgĄ─▀\(y©┤n)╦ŃĮY(ji©”)╣¹ĪŻ
╩«╚²Īó│╠ą“ĮM┐Śå╬į¬Ż©POUŻ®
īóų„│╠ą“Īóūė│╠ą“║═ųąöÓ│╠ą“Įy(t©»ng)ĘQ×ķ│╠ą“ĮM┐Śå╬į¬Ż©POUŻ®Ż¼Ė„POUČ╝ėąūį╝║Ą─64BĄ─Šų▓┐┤µā”Ų„Ż╗╩╣ė├╠▌ą╬łD║═╣”─▄─ŻēKłDĢr(sh©¬)Ż¼īó▒Ż┴¶Šų▓┐┤µā”Ų„Ą─ūŅ║¾4BĪŻ
╩«╦─ĪóŠų▓┐┤µā”Ų„Ż©LŻ®Īóūā┴┐┤µā”Ų„Ż©VŻ®
āHį┌╦³▒╗äō(chu©żng)Į©Ą─POUųąėąą¦Ż¼Ė„POU▓╗─▄įLå¢äeĄ─POUĄ─Šų▓┐┤µā”Ų„Ż╗ūā┴┐┤µā”Ų„Ż©VŻ®╩Ū╚½Šų┤µā”Ų„Ż¼┐╔ęį▒╗╦∙ėąĄ─POUįLå¢ĪŻ
╩«╬ÕĪó─ŻöM┴┐▌ö╚ļŻ©AIŻ®
AI─ŻēKīó▀B└m(x©┤)ūā╗»Ą──ŻöM┴┐░┤▒╚└²▐D(zhu©Żn)ōQ×ķę╗éĆ(g©©)ūųķLŻ©16╬╗Ż®Ą─öĄ(sh©┤)ūų┴┐Ż¼ė├ģ^(q©▒)ė“ś╦(bi©Īo)ūRĘ¹AIĪó▒Ē╩ŠöĄ(sh©┤)ō■(j©┤)ķLČ╚Ą─WŻ©ūųŻ®║═Ų╩╝ūų╣Ø(ji©”)Ą─ĄžųĘüĒ▒Ē╩Š─ŻöM┴┐▌ö╚ļĄ─ĄžųĘŻ¼└²╚ńAW16Ż¼─ŻöM┴┐▌ö╚ļųĄ×ķų╗ūxöĄ(sh©┤)ō■(j©┤)ĪŻ
╩«┴∙Īó─ŻöM┴┐▌ö│÷Ż©AQŻ®
AO─ŻēKīóķLČ╚×ķę╗éĆ(g©©)ūųĄ─öĄ(sh©┤)ūų▐D(zhu©Żn)ōQ×ķ¼F(xi©żn)īŹ(sh©¬)╩└ĮńĄ──ŻöM┴┐Ż¼ė├ģ^(q©▒)ė“ś╦(bi©Īo)ūRĘ¹AQĪó▒Ē╩ŠöĄ(sh©┤)ō■(j©┤)ķLČ╚WŻ©ūųŻ®║═Ų╩╝ūų╣Ø(ji©”)Ą─ĄžųĘüĒ▒Ē╩Š┤µā”─ŻöM┴┐▌ö│÷Ą─ĄžųĘŻ¼└²╚ńAQW32Ż¼─ŻöM┴┐▌ö│÷ųĄ╩Ūų╗īæöĄ(sh©┤)ō■(j©┤)Ż¼ė├æ¶▓╗─▄ūx╚Ī─ŻöM┴┐▌ö│÷ųĄĪŻ
╩«Ų▀Īó╩╣─▄▌ö╚ļ┼c╩╣─▄▌ö│÷
╠▌ą╬łDųąŻ¼ė├ĘĮ┐“ńSĤ─│ą®ųĖ┴ŅŻ¼└²╚ńČ©Ģr(sh©¬)Ų„║═öĄ(sh©┤)īW(xu©”)▀\(y©┤n)╦ŃųĖ┴ŅŻ¼═©│ŻĘĮ┐“ųĖ┴ŅĄ─▌ö╚ļČ╦į┌ū¾▀ģŻ¼▌ö│÷Č╦į┌ėę▀ģŻ╗─▄┴„Å─ū¾ų┴ėęŻ¼▓╗─▄ėąČ╠┬ĘĪóķ_┬Ę║═Ę┤ĘĮŽ“Ą──▄┴„Ż¼Ū░ę╗éĆ(g©©)ĘĮ┐“Ą─▌ö│÷┐╔ęįū„×ķ║¾ę╗éĆ(g©©)ĘĮ┐“Ą─▌ö╚ļĪŻ
╩«░╦ĪóęŲ╬╗ųĖ┴Ņ┼c裣h(hu©ón)ęŲ╬╗ųĖ┴Ņ
| ╠▌ą╬łD | šZŠõ▒Ē | ├Ķ╩÷ |
|---|---|---|
| SHR_B | SRB OUT,N | ėęęŲūų╣Ø(ji©”) |
| SHL_B | SLB OUT,N | ū¾ęŲūų╣Ø(ji©”) |
| SHR_W | SRW OUT,N | ėęęŲūų |
| SHL_W | SLW OUT,N | ū¾ęŲūų |
| SHR_DW | SRD OUT,N | ėęęŲļpūų |
| SHL_DW | SLD OUT,N | ū¾ęŲļpūų |
▒Ē1ĪóęŲ╬╗ųĖ┴Ņ
| ╠▌ą╬łD | šZŠõ▒Ē | ├Ķ╩÷ |
|---|---|---|
| ROR_B | RRB OUT,N | 裣h(hu©ón)ėęęŲūų╣Ø(ji©”) |
| ROL_B | RLB OUT,N | 裣h(hu©ón)ū¾ęŲūų╣Ø(ji©”) |
| ROR_W | RRW OUT,N | 裣h(hu©ón)ėęęŲūų |
| ROL_W | RLW OUT,N | 裣h(hu©ón)ū¾ęŲūų |
| ROR_DW | RRD OUT,N | 裣h(hu©ón)ėęęŲļpūų |
| ROL_DW | RLD OUT,N | 裣h(hu©ón)ū¾ęŲļpūų |
| SHRB | SHRB DATA,S BIT,N | ęŲ╬╗╝─┤µŲ„ |
▒Ē2Īó裣h(hu©ón)ęŲ╬╗ųĖ┴Ņ
╩«Š┼ĪóöĄ(sh©┤)ō■(j©┤)▐D(zhu©Żn)ōQųĖ┴Ņ
īŹ(sh©¬)¼F(xi©żn)ūų╣Ø(ji©”)Ż©BŻ®┼cš¹öĄ(sh©┤)Ż©IŻ®Īóš¹öĄ(sh©┤)┼cļpš¹öĄ(sh©┤)Ż©DIŻ®ĪóBCD┤a┼cš¹öĄ(sh©┤)Īóļpš¹öĄ(sh©┤)Ż©DIŻ®┼cīŹ(sh©¬)öĄ(sh©┤)Ż©RŻ®ų«ķgĄ─▐D(zhu©Żn)ōQųĖ┴ŅŻ¼ęį╝░Ų▀Č╬ūg┤aųĖ┴ŅĪŻ
| ╠▌ą╬łD | šZŠõ▒Ē | ├Ķ╩÷ |
|---|---|---|
| B_I | BTI IN,OUT | ūų╣Ø(ji©”)▐D(zhu©Żn)ōQ×ķš¹öĄ(sh©┤) |
| I_B | ITB IN,OUT | š¹öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķūų╣Ø(ji©”) |
| I_DI | ITD IN,OUT | š¹öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķļpš¹öĄ(sh©┤) |
| DI_I | DTI IN,OUT | ļpš¹öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķš¹öĄ(sh©┤) |
| DI_R | DTR IN,OUT | ļpš¹öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķīŹ(sh©¬)öĄ(sh©┤) |
| I_BCD | IBCD OUT | š¹öĄ(sh©┤)▐D(zhu©Żn)ōQ×ķBCD┤a |
| BCD_I | BCDI OUT | BCD┤a▐D(zhu©Żn)ōQ×ķš¹öĄ(sh©┤) |
| ROUND | ROUND IN,OUT | īŹ(sh©¬)öĄ(sh©┤)╦─╔ß╬Õ╚ļ×ķļpš¹öĄ(sh©┤) |
| TRUNC | TRUNC IN,OUT | īŹ(sh©¬)öĄ(sh©┤)Įž╬╗╚Īš¹×ķļpš¹öĄ(sh©┤) |
| SEG | SEG IN,OUT | Č╬┤a |
| DECO | DECO IN,OUT | ĮŌ┤a |
| ENCO | ENCO IN,OUT | ŠÄ┤a |
▒Ē3ĪóöĄ(sh©┤)ō■(j©┤)▐D(zhu©Żn)ōQųĖ┴Ņ
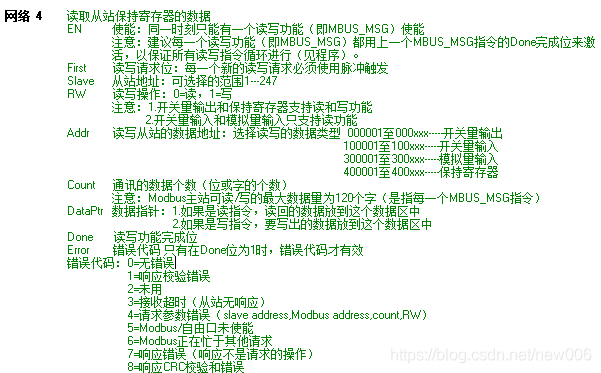
Č■╩«ĪóĢr(sh©¬)ńŖųĖ┴Ņ
| ╠▌ą╬łD | šZŠõ▒Ē | ├Ķ╩÷ |
|---|---|---|
| READ_RTC | TORD T | ūx╚ĪīŹ(sh©¬)Ģr(sh©¬)Ģr(sh©¬)ńŖ |
| SET_RTC | TODW T | įO(sh©©)ų├īŹ(sh©¬)Ģr(sh©¬)Ģr(sh©¬)ńŖ |
| READ_RTCX | TODRX T | ūx╚ĪöU(ku©░)š╣īŹ(sh©¬)Ģr(sh©¬)Ģr(sh©¬)ńŖ |
| SET_RTCX | TODWX T | įO(sh©©)ų├öU(ku©░)š╣īŹ(sh©¬)Ģr(sh©¬)Ģr(sh©¬)ńŖ |
▒Ē4ĪóĢr(sh©¬)ńŖųĖ┴Ņ
└²Ż║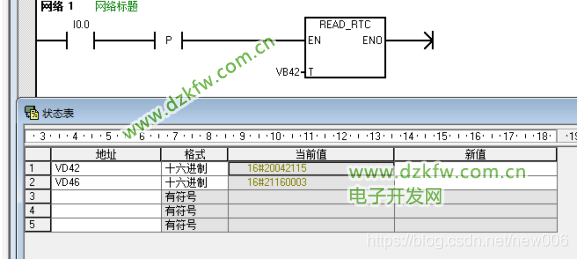
łD4
╚ńłD4╦∙╩ŠŻ¼▒Ē╩Šį┌I0.0Ą─╔Ž╔²čžūx╚Ī╚šŲ┌Ģr(sh©¬)ķgųĄŻ¼ė├VB42ķ_╩╝Ą─Ģr(sh©¬)ķgŠÅø_ģ^(q©▒)▒Ż┤µūx╚ĪĄ─ųĄĪŻīó╦∙ŠÄ│╠ą“Ž┬▌dĄĮPLCų«║¾Ż¼┤“ķ_I0.0,┐╔ęįį┌ĀŅæB(t©żi)▒Ē└’▒O(ji©Īn)┐žVD42║═VD46ųąūx╚ĪĄ─BCD┤aųĄŻ¼łDųąūx╚ĪĄ─ųĄ×ķ2020─Ļ4į┬21╚š15³c(di©Żn)21Ęų16├ļŻ¼ąŪŲ┌Č■Ż╗
į┌ąŪŲ┌Ą─╚ĪųĄųąŻ¼ąŪŲ┌Ą─╚ĪųĄĘČć·×ķ07Ż¼1▒Ē╩ŠąŪŲ┌╚šŻ¼27▒Ē╩ŠąŪŲ┌ę╗ĄĮąŪŲ┌┴∙Ż¼×ķ0Ģr(sh©¬)īóĮ¹ė├ąŪŲ┌Ż©▒Ż│ų×ķ0Ż®ĪŻ
Č■╩«ę╗Īó┐┤ķT╣Ę
CPU裣h(hu©ón)Ą─裣h(hu©ón)▒O(ji©Īn)ęĢĢr(sh©¬)ķgĄ─ķ_╩╝Ż©500msŻ®Ż╗│╠ą“ł╠(zh©¬)ąąĢr(sh©¬)ķg│¼▀^500ms╗“š▀▀M(j©¼n)╚ļ╦└裣h(hu©ón)Ģr(sh©¬)Ģ■ł¾(b©żo)Õe(cu©░)ĪŻ
Č■╩«Č■Īó▀^│╠ė│Ž±ģ^(q©▒)
į┌裣h(hu©ón)│╠ą“╠Ä└Ē▀^│╠ųąŻ¼CPUąĶę¬ę╗ų┬Ą─▀^│╠ė│Ž±ą┼╠¢ĪŻ×ķ┤╦į┌│╠ą“ł╠(zh©¬)ąąų«Ū░ūx╚Ī/īæ╚ļ▀^│╠ą┼╠¢ĪŻį┌ļS║¾Ą─│╠ą“╠Ä└ĒųąĪŻCPUį┌ī”▌ö╚ļŻ©IŻ®║═▌ö│÷Ż©QŻ®ĄžųĘģ^(q©▒)īżųĘĢr(sh©¬)▓╗ų▒ĮėįLå¢ą┼╠¢─ŻēKŻ¼Č°╩ŪįLå¢░³║¼I/O▀^│╠ė│Ž±Ą─CPUŽĄĮy(t©»ng)┤µā”ģ^(q©▒)ĪŻ
Č■╩«╚²Īóų„│╠ą“Īóūė│╠ą“ĪóųąöÓ│╠ą“
ų„│╠ą“裣h(hu©ón)ł╠(zh©¬)ąąŻ¼┐╔ęįš{(di©żo)ė├ūė│╠ą“Ż╗
ūė│╠ą“┐╔ęįŪÕ╬·Ą─ųĖ│÷│╠ą“ąĶꬥ─╣”─▄Ż¼ų„│╠ą“ųą╝ė╚ļĄ─ūė│╠ą“ꬎ╚ł╠(zh©¬)ąąūė│╠ą“▓┼─▄ł╠(zh©¬)ąąŽ┬ę╗Č╬ų„│╠ą“Ż¼ūė│╠ą“ųą▀Ć┐╔ęįš{(di©żo)ė├ūė│╠ą“Ż¼ę╗╣▓┐╔ęįš{(di©żo)ė├8éĆ(g©©)Ż¼Žļ╚½▓┐ł╠(zh©¬)ąą═Ļ▓┼─▄▀M(j©¼n)╚ļŽ┬ę╗Č╬ų„│╠ą“Ż╗S7-200 CPUūŅČÓ┐╔ęįš{(di©żo)ė├64éĆ(g©©)ūė│╠ą“Ż©CPU226×ķ128éĆ(g©©)Ż®Ż╗ūė│╠ą“┐╔ęįĦģóöĄ(sh©┤)š{(di©żo)ė├Ż¼į┌ūė│╠ą“Ą─Šų▓┐ūā┴┐▒ĒųąįO(sh©©)ų├ģóöĄ(sh©┤)Ą─ŅÉą═Ż¼ę╗╣▓┐╔ęįĦ16éĆ(g©©)ģóöĄ(sh©┤)ĪŻ
ųąöÓ│╠ą“Ż║░l(f©Ī)╔·─│ę╗╩┬╝■║¾ł╠(zh©¬)ąą┤╦│╠ą“Ż╗ų╗─▄ŪČę╗éĆ(g©©)ūė│╠ą“Ż╗ųąöÓ│╠ą“ėą▓╗═¼Ą─ā×(y©Łu)Ž╚╝ēŻ¼ųąöÓ│╠ą“▓╗─▄į┘▒╗┤“öÓŻ¼Ģ■░┤šš░l(f©Ī)╔·Ą─Ģr(sh©¬)ķgĒśą“║═ā×(y©Łu)Ž╚╝ē┼┼ĻĀ(du©¼)ĪŻ
Č■╩«╦─Īó╚ńłD5Ż¼Ęųäe×ķŻ║
╚ĪĘ┤
┼c
╗“
«É╗“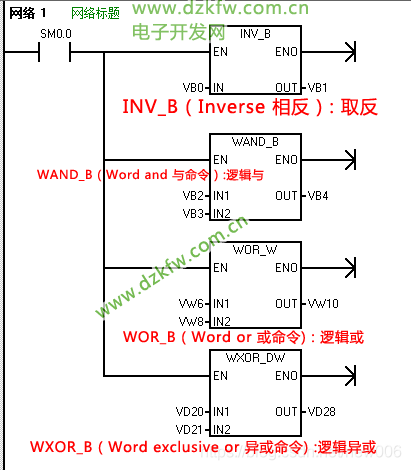
łD5
Č■╩«╬ÕĪóFOR/NEXTųĖ┴Ņ
├┐ŚlFORųĖ┴Ņ▒žĒÜī”æ¬(y©®ng)ę╗ŚlNEXTųĖ┴ŅŻ╗FOR/NEXTųĖ┴Ņ裣h(hu©ón)┐╔ŪČ╠ū╔ŅČ╚┐╔▀_(d©ó)8īėŻ╗FORųĖ┴Ņė├čžė|░l(f©Ī)Ż╗裣h(hu©ón)ĮY(ji©”)╩°Ż¼«ö(d©Īng)Ž┬ę╗┤╬į╩įSĢr(sh©¬)Ż¼F(xi©żn)OR/NEXTųĖ┴ŅÅ═(f©┤)╬╗╦³ūį╝║Ż¼▓ó░č│§╩╝ųĄ┐ĮžÉĄĮINDXųąĪŻ
Č■╩«┴∙Īó│╠ą“┐žųŲŻ¼Ēśą“┐žųŲ
├┐ŚlSCRųĖ┴Ņ▒žĒÜī”æ¬(y©®ng)ėąSCREĮY(ji©”)╩°ų«ņ`Ż╗
▓╗─▄░č═¼ę╗éĆ(g©©)S╬╗ė├ė┌▓╗═¼│╠ą“ųąŻ¼└²╚ńŻ║╚ń╣¹į┌ų„│╠ą“ųąė├┴╦S0.1Ż¼į┌ūė│╠ą“ųąŠ═▓╗─▄į┘╩╣ė├╦³Ż╗
į┌SCRČ╬ų«ķg▓╗─▄╩╣ė├JMP║═LBLųĖ┴ŅŻ¼Ą½┐╔ęįį┌SCRČ╬ā╚(n©©i)╩╣ė├╠°▐D(zhu©Żn)║═ś╦(bi©Īo)╠¢ųĖ┴ŅŻ╗SCRČ╬ų«ķgĄ─╠°▐D(zhu©Żn)Ż¼┐╔ęį╩╣ė├SCRT╗“Å═(f©┤)╬╗/ų├╬╗ųĖ┴Ņ
į┌SCRČ╬ųą▓╗─▄╩╣ė├ENDųĖ┴Ņ
Č■╩«Ų▀Īó│╠ą“┐žųŲŲõėÓųĖ┴Ņ
RET:Ė∙ō■(j©┤)Ū░ę╗éĆ(g©©)▀ē▌ŗÅ─ūė│╠ą“ĘĄ╗žų„│╠ą“Ż╗▄ø╝■ūįäėį┌ūė│╠ą“ūŅ║¾į÷╝ė¤oŚl╝■ĘĄ╗žĪŻ
ENDŻ║Ė∙ō■(j©┤)Ū░ę╗éĆ(g©©)▀ē▌ŗŚl╝■ĮKų╣ų„│╠ą“Ż╗┐╔ęįį┌ų„│╠ą“ųą╩╣ė├Ī░ėąŚl╝■ĮY(ji©”)╩°Ī▒ųĖ┴ŅŻ¼Ą½▓╗─▄į┌ūė│╠ą“╗“ųąöÓ│╠ą“ųą╩╣ė├Ż╗▄ø╝■ūįäėį┌ų„│╠ą“ūŅ║¾į÷╝ė¤oŚl╝■ĮY(ji©”)╩°ĪŻ
STOPŻ║ųžą┬īóPLC▐D(zhu©Żn)ōQų┴STOP─Ż╩ĮĪŻ
WDRŻ║ųžą┬ė|░l(f©Ī)CPUĄ─┐┤ķT╣ĘČ©Ģr(sh©¬)Ų„Ż¼öU(ku©░)š╣Æ▀├Ķį╩įS╩╣ė├Ą─Ģr(sh©¬)ķgŻ¼Č°▓╗Ģ■│÷¼F(xi©żn)┐┤ķT╣ĘÕe(cu©░)š`Ż╗╔„ė├ŻĪŻĪŻĪ
DIAG-LEDŻ║įO(sh©©)ų├į\öÓLED¤¶Ż╗«ö(d©Īng)▌ö╚ļ?y©▓n)óö?sh©┤)INĄ─öĄ(sh©┤)ųĄ×ķ┴ŃŻ¼ätį\öÓLEDĢ■▒╗įO(sh©©)ų├×ķ▓╗░l(f©Ī)╣ŌĪŻ╚ń╣¹▌ö╚ļ?y©▓n)óö?sh©┤)INĄ─öĄ(sh©┤)ųĄ┤¾ė┌┴ŃŻ¼ätį\öÓLEDĢ■▒╗įO(sh©©)ų├×ķ░l(f©Ī)╣ŌŻ©³S╔½Ż®ĪŻ
Č■╩«░╦ĪóBGN-ITIME║═CAL-ITIMEųĖ┴Ņ┐╔£y┴┐ā╔╚╬äš(w©┤)Ą─Ģr(sh©¬)ķgķgĖ¶Ż¼ę▓┐╔ķgĮėīŹ(sh©¬)¼F(xi©żn)Č©Ģr(sh©¬)╣”─▄ĪŻ
Č■╩«Š┼Īórs-485┐┌MODBUS═©ėŹ
Modbusų„šŠūxīæ│╠ą“
ūóęŌŻ║1ĪóModbus RTUų„šŠ╣”─▄╩Ū═©▀^ųĖ┴ŅÄņųąŅA(y©┤)Ž╚ŠÄ║├Ą─│╠ą“╣”─▄ēKīŹ(sh©¬)¼F(xi©żn)Ą─Ż¼įōÄņų╗ßśī”Port0┐┌ėąą¦
2ĪóModbus RTUų„šŠ╩╣ė├┴╦ę╗ą®ė├æ¶ųąöÓŻ¼į┌ė├æ¶│╠ą“ųą▓╗─▄Į¹ų╣ųąöÓ
3Īó┤╦╠ÄįLå¢Ą─×ķę╗éĆ(g©©)Å─šŠŻ¼╚¶įLå¢▓╗═¼Ą─Å─šŠŻ¼┐╔═©▀^Ė─ūāÅ─šŠĄžųĘüĒīŹ(sh©¬)¼F(xi©żn)
Ą┌ę╗▓Į│§╩╝╗»Ż║Å═(f©┤)╬╗modbusÄņ═Ļ│╔╬╗Ż¼│§╩╝╗»═Ļ│╔║¾Ż¼åóäėūxīæųĖ┴Ņm0.1ų├╬╗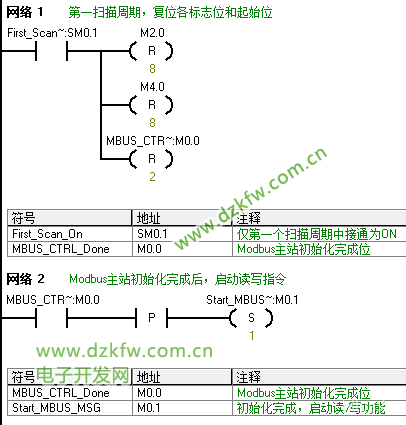
Ą┌Č■▓ĮŻ║╠ŅīæÅ─šŠ═©ėŹģóöĄ(sh©┤)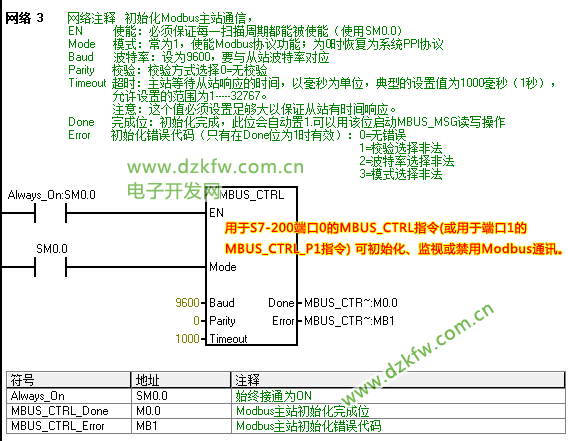
Ą┌╚²▓ĮŻ║M0.1ų├╬╗ūx╚ĪÅ─šŠöĄ(sh©┤)ō■(j©┤)Ż¼ūx╚Ī▒Ż│ų╝─┤µŲ„40001-40008 8éĆ(g©©)öĄ(sh©┤)ō■(j©┤)Ė∙ō■(j©┤)öĄ(sh©┤)ō■(j©┤)Ė±╩Įīæ╚ļ&VB1000Ż¼40001Ż¼40002×ķ32╬╗ĖĪ³c(di©Żn)öĄ(sh©┤)Ż¼ät▒Ż│ųį┌VB1000 VB1001 VB1002 VB1003ųąŻ¼ę└┤╬ŅÉ═ŲŻ¼ūx╚Ī═Ļ│╔M2.1ų├╬╗Ż¼Å═(f©┤)╬╗ūx╚ĪÅ─šŠ▒Ż│ų╝─┤µŲ„MO.1 M2.3
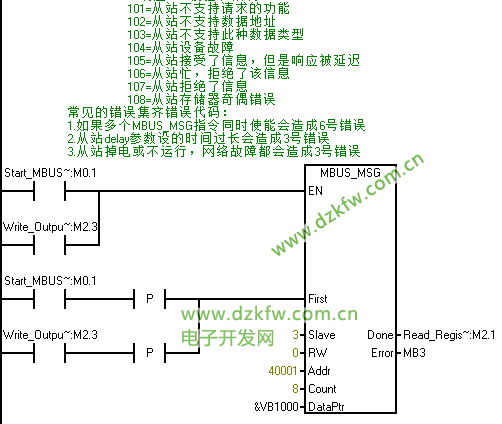
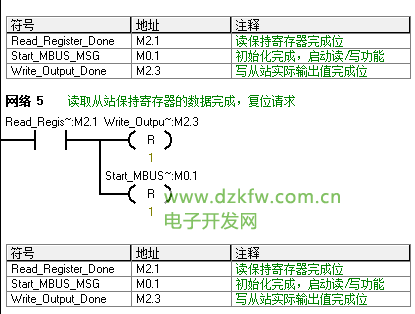
ūx╚Ī▌ö╚ļ╝─┤µŲ„Ż¼ūx╚Ī═Ļ│╔M2.2ų├╬╗Ż¼Å═(f©┤)╬╗M2.1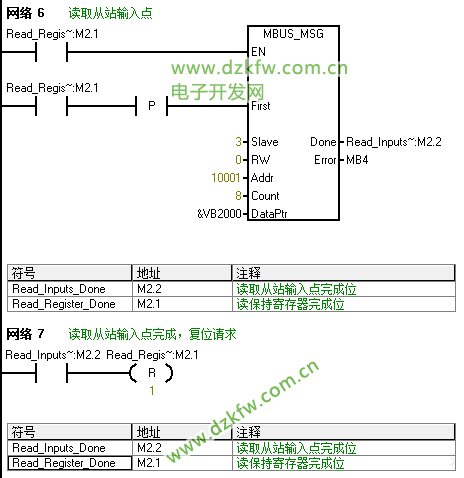
M2.2ų├╬╗Ż¼īæöĄ(sh©┤)ō■(j©┤)ķ_╩╝Ż¼VB3000īæ╚ļ00001ųąŻ¼īæ═Ļ│╔Ż¼M2.3ų├╬╗Ż¼ķ_╩╝ūxŻ¼M2.2Å═(f©┤)╬╗ĪŻ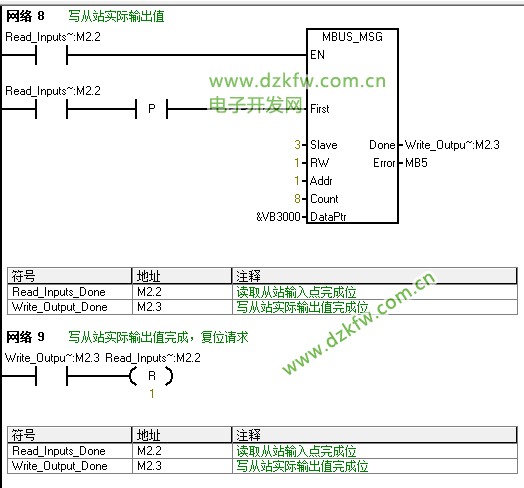
īó│╠ą“?q©▒)æ╚ļPLCŻ¼═©▀^┤«┐┌š{(di©żo)įćų·╩ųŻ¼PLCĮoļŖ─X░l(f©Ī)╦═╚ńŽ┬ųĖ┴Ņ
03 02 00 00 00 08 78 2E╩ŪPLCę¬ūx╚ĪÅ─šŠĄ─▌ö╚ļ³c(di©Żn)
03 0F 00 00 00 08 01 00 7F 4C╩ŪPLCę¬īæÅ─šŠĄ─▌ö╚ļ³c(di©Żn)
03 03 00 00 00 08 45 EE╩ŪPLCę¬ūxÅ─šŠĄ─▒Ż│ų╝─┤µŲ„
╚²╩«ĪóPLC×ķÅ─šŠMODBUS═©ėŹ
PLCųąĖ„╝─┤µŲ„ĄžųĘ┼cMODBUSĄžųĘī”šš▒Ē
| ╣”─▄╠¢ | ModbusĄžųĘ | s7-200PlcĄžųĘ | ├Ķ╩÷ |
|---|---|---|---|
| 0 | 00001Ī¬00128 | Q0.0Ī¬Q15.7 | Q▌ö│÷ |
| 00001 | Q0.0 | ||
| 00002 | Q0.1 | ||
| 00003 | Q0.2 | ||
| ĪŁ | ĪŁ | ||
| 00127 | Q15.6 | ||
| 00128 | Q15.7 | ||
| 1 | 10001Ī¬10128 | I0.0Ī¬I15.7 | I▌ö╚ļ |
| 10001 | I0.0 | ||
| 10002 | I0.1 | ||
| 10003 | I0.2 | ||
| ĪŁ | ĪŁ | ||
| 10127 | I15.6 | ||
| 10128 | I15.7 | ||
| 3 | 30001Ī¬30032 | AIW0Ī¬AIW62 | AI─ŻöM┴┐▌ö╚ļ |
| 30001 | AIW0 | ||
| 30002 | AIW2 | ||
| 30003 | AIW4 | ||
| ĪŁ | ĪŁ | ||
| 30031 | AIW60 | ||
| 30032 | AIW62 | ||
| 4 | 40001Ī¬4**** | TĪ¬T+2*(****-1) | Vģ^(q©▒)Ż©T×ķŲ╩╝╬╗Ż® |
| 40001 | T | ||
| 40002 | T+2*(2-1) | ||
| 40003 | T+2*(3-1) | ||
| ĪŁ | ĪŁ |
╚²╩«ę╗ĪóSCRųĖ┴Ņ
SCRųĖ┴ŅīŻķTė├ė┌ŠÄųŲĒśą“┐žųŲ│╠ą“ĪŻĒśą“┐žųŲ│╠ą“▒╗Ęų×ķLSCR┼cSCREųĖ┴Ņų«ķgĄ─╚¶Ė╔éĆ(g©©)SCRČ╬Ż¼ę╗éĆ(g©©)SCRČ╬ī”æ¬(y©®ng)ė┌Ēśą“╣”─▄łDųąĄ─ę╗▓ĮĪŻ
ę╗éĆ(g©©)SCR│╠ą“Č╬ę╗░ŃėąęįŽ┬╚²ĘN╣”─▄Ż║
1)“ī(q©▒)äė╠Ä└ĒŻ║į┌įōČ╬ĀŅæB(t©żi)ėąą¦Ģr(sh©¬)Ż¼ę¬ū÷╩▓├┤╣żū„Ż¼ėąĢr(sh©¬)ę▓┐╔─▄▓╗ū÷╚╬║╬╣żū„ĪŻ
2)ųĖČ©▐D(zhu©Żn)ęŲŚl╝■║═─┐ś╦(bi©Īo)Ż║ØMūŃ╩▓├┤Śl╝■║¾ĀŅæB(t©żi)▐D(zhu©Żn)ęŲĄĮ║╬╠ÄĪŻ
3)▐D(zhu©Żn)ęŲį┤ūįäėÅ═(f©┤)╬╗╣”─▄Ż║ĀŅæB(t©żi)░l(f©Ī)╔·▐D(zhu©Żn)ęŲ║¾Ż¼ų├╬╗Ž┬ę╗éĆ(g©©)ĀŅæB(t©żi)Ą─═¼Ģr(sh©¬)Ż¼ūįäėÅ═(f©┤)╬╗įŁĀŅæB(t©żi)ĪŻ
S7-200 PLC╠ß╣®┴╦╚²ŚlĒśą“┐žųŲųĖ┴ŅŻ║čb▌dSCR(LSCR)ųĖ┴ŅĪóSCRé„▌ö(SCRT)ųĖ┴Ņ║═SCRĮY(ji©”)╩°(SCRE)ųĖ┴ŅĪŻ╚ńŽ┬łD╦∙╩Š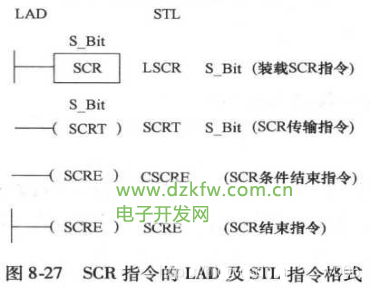
SCRųĖ┴ŅĄ─▓┘ū„╚ńŽ┬Ż║
1)čb▌dSCR (LSCRŻ¼Load SCR)ųĖ┴Ņė├üĒ▒Ē╩Šę╗éĆ(g©©)SCRČ╬Ż©╝┤Ēśą“╣”─▄łDųąĄ─▓ĮŻ®Ą─ķ_╩╝ĪŻųĖ┴ŅųąĄ─▓┘ū„öĄ(sh©┤)SĪ¬Bit×ķĒśą“┐žųŲ└^ļŖŲ„SŻ©BOOLą═Ż®Ą─ĄžųĘŻ¼Ēśą“┐žųŲ└^ļŖŲ„S×ķ1ĀŅæB(t©żi)Ģr(sh©¬)Ż¼ł╠(zh©¬)ąąī”æ¬(y©®ng)Ą─SCRČ╬ųąĄ─│╠ą“Ż¼Ę┤ų«ät▓╗ł╠(zh©¬)ąąĪŻ
2) SCRé„▌ö(SCRTŻ¼SCR Transition)ųĖ┴Ņīó│╠ą“┐žųŲÖÓ(qu©ón)Å─ę╗éĆ(g©©)╝ż╗ŅĄ─SCRČ╬é„▀fĄĮ┴Ēę╗éĆ(g©©)SCRČ╬Ż¼╝┤▓ĮĄ─╗ŅäėĀŅæB(t©żi)Ą─▐D(zhu©Żn)ōQĪŻł╠(zh©¬)ąąSCRTųĖ┴ŅŻ¼«ö(d©Īng)SCRTŠĆ╚”Ī░Ą├ļŖĪ▒Ģr(sh©¬)Ż¼SCRTųĖ┴ŅųąųĖČ©Ą─Ēśą“╣”─▄łDųąĄ─║¾└m(x©┤)▓Įī”æ¬(y©®ng)Ą─Ēśą“┐žųŲ└^ļŖŲ„S╬╗ų├╬╗Ż©ūā?y©Łu)?ĀŅæB(t©żi)Ż®Ż¼═¼Ģr(sh©¬)«ö(d©Īng)Ū░╗Ņäė▓Įī”æ¬(y©®ng)Ą─Ēśą“┐žųŲ└^ļŖŲ„S╬╗▒╗ŽĄĮy(t©»ng)│╠ą“Å═(f©┤)╬╗Ż©ūā?y©Łu)?ĀŅæB(t©żi)Ż®Ż¼«ö(d©Īng)Ū░▓Įūā?y©Łu)ķ▓╗╗Ņäė▓ĮĪ?BR>į┌SCRTųĖ┴Ņł╠(zh©¬)ąąĢr(sh©¬)Ż¼Å═(f©┤)╬╗«ö(d©Īng)Ū░╝ż╗ŅĄ─│╠ą“Č╬Ą─S╬╗▓ó▓╗Ģ■ė░ĒæSČ茯ĪŻSCRČ╬Ģ■ę╗ų▒▒Ż│ų─▄┴„ų▒ĄĮ═╦│÷ĪŻ
3) SCRĮY(ji©”)╩°(SCREŻ¼SCR END)ųĖ┴Ņś╦(bi©Īo)ųŠų°SCRČ╬Ą─ĮY(ji©”)╩°ĪŻ
╩╣ė├SCRųĖ┴ŅĢr(sh©¬)ėąęįŽ┬Ą─Ž▐ųŲŻ║
1) SCRųĖ┴ŅāHī”į¬╝■Sėąą¦Ż¼Ēśą“┐žųŲ└^ļŖŲ„Sę▓Š▀ėąę╗░Ń└^ļŖŲ„Ą─╣”─▄Ż¼╦∙ęįī”╦³─▄ē“╩╣ė├Ųõ╦¹ųĖ┴ŅĪŻ
2)▓╗─▄░č═¼ę╗éĆ(g©©)S╬╗ė├ė┌▓╗═¼│╠ą“ųąŻ¼└²╚ń╚ń╣¹į┌ų„│╠ą“ųą╩╣ė├┴╦SO.1Ż¼ätį┌ūė│╠ą“ųąŠ═▓╗─▄į┘╩╣ė├╦³ĪŻ
3)į┌SCRČ╬ųą▓╗─▄╩╣ė├JMP║═LBLųĖ┴ŅŻ¼╝┤▓╗į╩įSė├╠°▐D(zhu©Żn)Ą─ĘĮĘ©╠°╚ļ╗“╠°│÷SCRČ╬Ż╗Ą½┐╔ęįį┌SCRČ╬ĖĮĮ³╩╣ė├╠°▐D(zhu©Żn)║═ś╦(bi©Īo)╠¢ųĖ┴Ņ╗“š▀į┌Č╬ā╚(n©©i)╠°▐D(zhu©Żn)ĪŻ
4)į┌SCRČ╬ųą▓╗─▄╩╣ė├FORĪóNEXT║═ENDųĖ┴ŅĪŻ
5)į┌ĀŅæB(t©żi)░l(f©Ī)╔·▐D(zhu©Żn)ęŲ║¾Ż¼╦∙ėąĄ─SCRČ╬Ą─į¬╝■ę╗░Ńę▓ę¬Å═(f©┤)╬╗Ż¼╚ń╣¹ŽŻ═¹└^└m(x©┤)▌ö│÷Ż¼┐╔╩╣ė├ų├╬╗Ż»Å═(f©┤)╬╗ųĖ┴ŅĪŻ
6)į┌╩╣ė├Ēśą“╣”─▄łDĢr(sh©¬)Ż¼SCRČ╬Ą─ŠÄīæ┐╔ęį▓╗░┤Ēśą“ŠÄ┼┼ĪŻ
╚²╩«Č■Īóķ]Łh(hu©ón)┐žųŲ┼cPID┐žųŲŲ„
PID┐žųŲŻ©╝┤▒╚└²-ĘeĘų-╬óĘųŻ®ā×(y©Łu)³c(di©Żn)Ż║
1Īó╝┤╩╣ø]ėą┐žųŲŽĄĮy(t©»ng)Ą─öĄ(sh©┤)īW(xu©”)─Żą═Ż¼ę▓─▄Ą├ĄĮ▒╚▌^ØMęŌĄ─┐žųŲą¦╣¹Ż╗
2Īó═©▀^š{(di©żo)ė├PIDųĖ┴ŅüĒŠÄ│╠Ż¼│╠ą“įO(sh©©)ėŗ(j©¼)║åå╬Ż¼ģóöĄ(sh©┤)š{(di©żo)š¹ĘĮ▒ŃŻ╗
3Īóėą▌^ÅŖ(qi©óng)Ą─ņ`╗Ņąį║═▀mæ¬(y©®ng)ąįŻ¼Ė∙ō■(j©┤)▒╗┐žī”Ž¾Ą─Š▀¾wŪķørŻ¼┐╔ęį▓╔ė├PĪóPIĪóPDĪó║═PIDĄ╚ĘĮ╩ĮŻ¼S7-200Ą─PIDųĖ┴Ņ▀Ć▓╔ė├┴╦ę╗ą®Ė─▀M(j©¼n)Ą─┐žųŲĘĮ╩ĮĪŻ
─ŻöM┴┐ķ]Łh(hu©ón)┐žųŲŻ║
į┌─ŻöM┴┐ķ]Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)ųąŻ¼▒╗┐ž┴┐cŻ©tŻ®▒╗é„ĖąŲ„║═ūā╦═Ų„▐D(zhu©Żn)ōQ×ķś╦(bi©Īo)£╩(zh©│n)┴┐│╠Ą─ų▒┴„ļŖ┴„ĪóļŖē║ą┼╠¢PV(t)Ż¼PLCė├─ŻöM┴┐▌ö╚ļ─ŻēKųąĄ─A-D▐D(zhu©Żn)ōQŲ„Ż¼īó╦³éā▐D(zhu©Żn)ōQ×ķĢr(sh©¬)ķg╔Žļx╔óĄ─ČÓ╬╗Č■▀M(j©¼n)ųŲ▀^│╠ūā┴┐Ż©ėųĘQ×ķĘ┤üųĄŻ®PVnĪŻ
─ŻöM┴┐┼cöĄ(sh©┤)ūų┴┐ų«ķgĄ─ŽÓ╗ź▐D(zhu©Żn)ōQ║═PID│╠ą“Ą─ł╠(zh©¬)ąąČ╝╩Ūų▄Ų┌ąįĄ─▓┘ū„Ż¼ŲõķgĖ¶Ģr(sh©¬)ķgĘQ×ķ▓╔śėų▄Ų┌TsĪŻĖ„öĄ(sh©┤)ūų┴┐ųąĄ─Ž┬ś╦(bi©Īo)n▒Ē╩Šįōūā┴┐╩ŪĄ┌n┤╬▓╔śėėŗ(j©¼)╦ŃĢr(sh©¬)Ą─öĄ(sh©┤)ūų┴┐ĪŻ
╣żū„įŁ└ĒŻ║
ķ]Łh(hu©ón)žō(f©┤)Ę┤ü┐žųŲ┐╔ęį╩╣▀^│╠ūā┴┐PVnĄ╚ė┌╗“Ė·ļSįO(sh©©)Č©ųĄSPnĪŻ
ąį─▄ųĖś╦(bi©Īo)Ż║
ė╔ė┌ĮoČ©▌ö╚ļą┼╠¢╗“ö_äė▌ö╚ļą┼╠¢Ą─ūā╗»Ż¼╩╣ŽĄĮy(t©»ng)Ą─▌ö│÷┴┐░l(f©Ī)╔·ūā╗»Ż¼į┌ŽĄĮy(t©»ng)▌ö│÷┴┐▀_(d©ó)ĄĮĘĆ(w©¦n)æB(t©żi)ų«Ū░Ą─▀^│╠ĘQ×ķ▀^Č╔▀^│╠╗“äėæB(t©żi)▀^│╠Ż╗ŽĄĮy(t©»ng)Ą─äėæB(t©żi)▀^│╠Ą─ąį─▄ųĖś╦(bi©Īo)ė├ļA▄SĒææ¬(y©®ng)Ą─ģóöĄ(sh©┤)üĒ├Ķ╩÷Ż¼ļA▄SĒææ¬(y©®ng)╩ŪųĖŽĄĮy(t©»ng)Ą─▌ö╚ļą┼╠¢ļA▄Sūā╗»Ģr(sh©¬)ŽĄĮy(t©»ng)Ą─Ēææ¬(y©®ng)ĪŻ
ķ]Łh(hu©ón)┐žųŲĦüĒĄ─å¢Ņ}Ż║
╩╣ė├ķ]Łh(hu©ón)┐žųŲ║¾Ż¼▓ó▓╗─▄▒ŻūCĄ├ĄĮ┴╝║├Ą─äėņoæB(t©żi)ąį─▄Ż¼▀@ų„ę¬╩Ūė╔ŽĄĮy(t©»ng)ųąĄ─£■║¾ę“╦žįņ│╔Ą─Ż¼ķ]Łh(hu©ón)ųąĄ─£■║¾ę“╦žų„ę¬üĒį┤ė┌▒╗┐žī”Ž¾ĪŻ
ķ]Łh(hu©ón)┐žųŲĘ┤üśOąįĄ─┤_Č©Ż║
ķ]Łh(hu©ón)┐žųŲ▒žĒÜ▒ŻūCŽĄĮy(t©»ng)╩Ūžō(f©┤)Ę┤üŻ©š`▓Ņ=įO(sh©©)Č©ųĄ-▀^│╠ūā┴┐Ż®Ż¼Č°▓╗╩Ūš²Ę┤üŻ©š`▓Ņ=įO(sh©©)Č©ųĄ+▀^│╠ūā┴┐Ż®Ż╗╚ń╣¹ŽĄĮy(t©»ng)Įė│╔┴╦š²Ę┤üŻ¼īóĢ■╩¦┐žŻ¼▒╗┐ž┴┐Ģ■═∙å╬ę╗ĘĮŽ“į÷┤¾╗“£p╔┘Ż¼ĮoŽĄĮy(t©»ng)Ą─░▓╚½Ä¦üĒśO┤¾Ą─═■├{ĪŻ
┼ąöÓĘ┤üśOąįĄ─▐kĘ©Ż║
į┌š{(di©żo)įćĢr(sh©¬)öÓķ_─ŻöM┴┐▌ö│÷─ŻēK┼cł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)ų«ķgĄ─▀BŠĆŻ¼į┌ķ_Łh(hu©ón)ĀŅæB(t©żi)Ž┬▀\(y©┤n)ąąPID┐žųŲ│╠ą“ĪŻ╚ń╣¹┐žųŲŲ„ėąĘeĘųŁh(hu©ón)╣Ø(ji©”)Ż¼ę“?y©żn)ķĘ┤ü▒╗öÓķ_┴╦Ż¼▓╗─▄Ž¹│²š`▓ŅŻ¼─ŻöM┴┐▌ö│÷─ŻēKĄ─▌ö│÷ļŖē║╗“ļŖ┴„Ģ■Ž“ę╗éĆ(g©©)ĘĮŽ“ūā╗»Ż╗▀@Ģr(sh©¬)╚ń╣¹╝┘įO(sh©©)Įė╔Žł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)Ż¼─▄£p╔┘š`▓ŅŻ¼ät×ķžō(f©┤)Ę┤üŻ¼Ę┤ų«×ķš²Ę┤üĪŻ
ūį╝║īW(xu©”)┴Ģ(x©¬)╦∙ėøõøŻ¼ėą▓╗ūŃšłųĖĮ╠Ż¼╚¶ėą┼d╚żę╗ŲĮ╗┴„Ż¼ĻP(gu©Īn)ūó╬óą┼╣½▒Ŗ╠¢Ż║ļŖūėķ_░l(f©Ī)ŠW(w©Żng)
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū