
į┌200SMARTŽĄ┴ąPLCųą╣▓ėą╚²┤¾ŅÉųąöÓ╩┬╝■Ż¼Ęųäe╩Ū:I/OųąöÓŻ║I/O ųąöÓ░³└©╔Ž╔²/Ž┬ĮĄčžųąöÓĪóĖ▀╦┘ėŗöĄŲ„ųąöÓ║═├}ø_┤«▌ö│÷ųąöÓĪŻCPU ┐╔ęį×ķ▌ö╚ļ═©Ą└ I0.0ĪóI0.1ĪóI0.2 ║═ I0.3Ż©ęį╝░Ħėą┐╔▀xöĄūų┴┐▌ö╚ļą┼╠¢░ÕĄ─ś╦£╩ CPU Ą─▌ö╚ļ═©Ą└ I7.0 ║═ I7.1Ż®╔·│╔▌ö╚ļ╔Ž╔²║═/╗“Ž┬ĮĄčžųąöÓĪŻ┐╔ī”▀@ą®▌ö╚ļ³cųąĄ─├┐ę╗éĆ▓ČūĮ╔Ž╔²čž║═Ž┬ĮĄčž╩┬╝■ĪŻ▀@ą®╔Ž╔²čž/Ž┬ĮĄčž╩┬╝■┐╔ė├ė┌ųĖ╩Šį┌╩┬╝■░l╔·Ģr▒žĒÜ┴ó╝┤╠Ä└ĒĄ─ĀŅørĪŻ
Ė▀╦┘ėŗöĄŲ„ųąöÓ┐╔ęįī”Ž┬┴ąŪķørū÷│÷Ēææ¬Ż║«öŪ░ųĄ▀_ĄĮŅAįOųĄŻ¼┼c▌Są²▐DĘĮŽ“Ę┤Ž“ŽÓī”æ¬Ą─ėŗöĄĘĮŽ“░l╔·Ė─ūā╗“ėŗöĄŲ„═Ō▓┐Å═╬╗ĪŻ▀@ą®Ė▀╦┘ėŗöĄŲ„╩┬╝■Š∙┐╔ė|░līŹĢrł╠ąąĄ─▓┘ū„Ż¼ęįĒææ¬į┌┐╔ŠÄ│╠▀ē▌ŗ┐žųŲŲ„Æ▀├Ķ╦┘Č╚Ž┬¤oĘ©┐žųŲĄ─Ė▀╦┘╩┬╝■ĪŻ ├}ø_┤«▌ö│÷ųąöÓį┌ųĖČ©Ą─├}ø_öĄ═Ļ│╔▌ö│÷Ģr┴ó╝┤▀MąąĒææ¬ĪŻ├}ø_┤«▌ö│÷Ą─Ąõą═æ¬ė├×ķ▓Į▀MļŖÖC┐žųŲĪŻ
═©ą┼ųąöÓŻ║CPU Ą─┤«ąą═©ą┼Č╦┐┌┐╔═©▀^│╠ą“▀Mąą┐žųŲĪŻ═©ą┼Č╦┐┌Ą─▀@ĘN▓┘ū„─Ż╩ĮĘQ×ķūįė╔Č╦┐┌─Ż╩ĮĪŻį┌ūįė╔Č╦┐┌─Ż╩ĮŽ┬Ż¼│╠ą“Č©┴x▓©╠ž┬╩Īó├┐éĆūųĘ¹Ą─╬╗öĄĪóŲµ┼╝ąŻ“×║═ģfūhĪŻĮė╩š║═░l╦═ųąöÓ┐╔║å╗»│╠ą“┐žųŲĄ─═©ą┼
Ģr╗∙ųąöÓŻ║╗∙ė┌ĢrķgĄ─ųąöÓ░³└©Č©ĢrųąöÓ║═Č©ĢrŲ„ T32/T96 ųąöÓĪŻ┐╔╩╣ė├Č©ĢrųąöÓųĖȩ裣hł╠ąąĄ─▓┘ū„ĪŻčŁŁhĢrķg╬╗ė┌ 1 ms ĄĮ 255 ms ų«ķgŻ¼░┤į÷┴┐×ķ 1 ms ▀MąąįOų├ĪŻ▒žĒÜį┌Č©ĢrųąöÓ 0 Ą─ SMB34 ║═Č©ĢrųąöÓ 1 Ą─ SMB35 ųąīæ╚ļ裣hĢrķgĪŻ
├┐┤╬Č©ĢrŲ„ĄĮĢrĢrŻ¼Č©ĢrųąöÓ╩┬╝■Č╝Ģ■īó┐žųŲÖÓé„▀fĮoŽÓæ¬Ą─ųąöÓ│╠ą“ĪŻ═©│ŻŻ¼┐╔ęį╩╣ė├Č©ĢrųąöÓüĒ┐žųŲ─ŻöM┴┐▌ö╚ļĄ─▓╔śė╗“Č©Ų┌ł╠ąą PID ╗ž┬ĘĪŻīóųąöÓ│╠ą“▀BĮėĄĮČ©ĢrųąöÓ╩┬╝■ĢrŻ¼åóė├Č©ĢrųąöÓ▓óŪęķ_╩╝Č©ĢrĪŻ▀BĮėŲ┌ķgŻ¼ŽĄĮy▓ČūĮų▄Ų┌ĢrķgųĄŻ¼ę“┤╦ SMB34 ║═ SMB35 Ą─║¾└mūā╗»▓╗Ģ■ė░Ēæų▄Ų┌ĢrķgĪŻę¬Ė³Ė─ų▄Ų┌ĢrķgŻ¼▒žĒÜą▐Ė─ų▄Ų┌ĢrķgųĄŻ¼╚╗║¾īóųąöÓ└²│╠ą“ųžą┬▀BĮėĄĮČ©ĢrųąöÓ╩┬╝■ĪŻųžą┬▀BĮėĢrŻ¼Č©ĢrųąöÓ╣”─▄Ģ■ŪÕ│²Ž╚Ū░▀BĮėĄ─╦∙ėą└█ėŗĢrķgŻ¼▓óķ_╩╝ė├ą┬ųĄėŗĢrĪŻ
Č©ĢrųąöÓåóė├║¾Ż¼īó▀B└m▀\ąąŻ¼├┐éĆ▀B└mĢrķgķgĖ¶║¾Ż¼Ģ■ł╠ąą▀BĮėĄ─ųąöÓ│╠ą“ĪŻ╚ń╣¹═╦│÷ RUN ─Ż╩Į╗“ĘųļxČ©ĢrųąöÓŻ¼Č©ĢrųąöÓīóĮ¹ė├ĪŻ╚ń╣¹ł╠ąą┴╦╚½Šų DISIŻ©ųąöÓĮ¹ų╣Ż®ųĖ┴ŅŻ¼Č©ĢrųąöÓĢ■└^└m│÷¼FŻ¼Ą½╩Ū╔ą╬┤╠Ä└Ē╦∙▀BĮėĄ─ųąöÓ│╠ą“ĪŻ├┐┤╬Č©ĢrųąöÓ│÷¼FŠ∙┼┼ĻĀĄ╚║“Ż¼ų▒ų┴ųąöÓåóė├╗“ĻĀ┴ąęčØMĪŻ ╩╣ė├Č©ĢrŲ„ T32/T96 ųąöÓ┐╔╝░ĢrĒææ¬ųĖČ©ĢrķgķgĖ¶Ą─ĮY╩°ĪŻāH 1 ms Ęų▒µ┬╩Ą─Įė═©čėĢr (TON) ║═öÓķ_čėĢr (TOF) Č©ĢrŲ„ T32 ║═ T96 ų¦│ų┤╦ŅÉųąöÓĪŻĘ±ät T32 ║═ T96 š²│Ż╣żū„ĪŻåóė├ųąöÓ║¾Ż¼╚ń╣¹į┌ CPU ųął╠ąąš²│ŻĄ─ 1 ms Č©ĢrŲ„Ė³ą┬Ų┌ķgŻ¼╝ż╗ŅČ©ĢrŲ„Ą─«öŪ░ųĄĄ╚ė┌ŅAįOĢrķgųĄŻ¼īół╠ąą▀BĮėĄ─ųąöÓ│╠ą“ĪŻ┐╔═©▀^īóųąöÓ│╠ą“▀BĮėĄĮ T32Ż©╩┬╝■ 21Ż®║═ T96Ż©╩┬╝■ 22Ż®ųąöÓ╩┬╝■üĒåóė├▀@ą®ųąöÓĪŻ
«öČÓéĆųąöÓ═¼Ģr░l╔·šłŪ¾ĢrŻ¼CPUī”ųąöÓĒææ¬ėąā׎╚Ēśą“Ż¼Å─Ė▀ĄĮĄ═Ą─ųąöÓĒśą“Ęųäe╩Ū═©ą┼ųąöÓĪóI/OųąöÓ╝░ūŅĄ═Ą─Ģr╗∙ųąöÓĪŻ ąĶę¬ūóęŌĄ─╩ŪŻ¼«ö▒╚╚ńį┌ł╠ąąI/OųąöÓĢrŻ¼═©ą┼ųąöÓėų«a╔·┴╦Ż¼┤╦Ģr▓╗Ģ■±R╔Ž╚źł╠ąą═©ą┼ųąöÓŻ¼Č°╩Ūł╠ąą═Ļš²į┌ł╠ąąĄ─I/OųąöÓ║¾į┘ł╠ąą═©ą┼ųąöÓĪŻČ°╚ń╣¹═¼Ģr«a╔·Ą─įÆŠ═╩Ū░┤ā׎╚Ēśą“ł╠ąą┴╦
Ž┬▒Ē×ķ▓╗═¼Ą─ųąöÓ╩┬╝■╠¢ī”æ¬Ą─ųąöÓ╩┬╝■:
|
╩┬╝■ |
šf├„ |
CR20s |
SR20/ST20 |
|---|---|---|---|
|
0 |
I0.0 ╔Ž╔²čž |
Y |
Y |
|
1 |
I0.0 Ž┬ĮĄčž |
Y |
Y |
|
2 |
I0.1 ╔Ž╔²čž |
Y |
Y |
|
3 |
I0.1 Ž┬ĮĄčž |
Y |
Y |
|
4 |
I0.2 ╔Ž╔²čž |
Y |
Y |
|
5 |
I0.2 Ž┬ĮĄčž |
Y |
Y |
|
6 |
I0.3 ╔Ž╔²čž |
Y |
Y |
|
7 |
I0.3 Ž┬ĮĄčž |
Y |
Y |
|
8 |
Č╦┐┌ 0 Įė╩šūųĘ¹ |
Y |
Y |
|
9 |
Č╦┐┌ 0 ░l╦══Ļ│╔ |
Y |
Y |
|
10 |
Č©ĢrųąöÓ 0Ż©SMB34 ┐žųŲĢrķgķgĖ¶Ż® |
Y |
Y |
|
11 |
Č©ĢrųąöÓ 1Ż©SMB35 ┐žųŲĢrķgķgĖ¶Ż® |
Y |
Y |
|
12 |
HSC0 CV=PVŻ©«öŪ░ųĄ = ŅAįOųĄŻ® |
Y |
Y |
|
13 |
HSC1 CV=PVŻ©«öŪ░ųĄ = ŅAįOųĄŻ® |
Y |
Y |
|
14-15 |
▒Ż┴¶ |
N |
N |
|
16 |
HSC2 CV=PVŻ©«öŪ░ųĄ = ŅAįOųĄŻ® |
Y |
Y |
|
17 |
HSC2 ĘĮŽ“Ė─ūā |
Y |
Y |
|
18 |
HSC2 ═Ō▓┐Å═╬╗ |
Y |
Y |
|
19 |
PTO0 ├}ø_ėŗöĄ═Ļ│╔ |
N |
Y |
|
20 |
PTO1 ├}ø_ėŗöĄ═Ļ│╔ |
N |
Y |
|
21 |
Č©ĢrŲ„ T32 CT=PTŻ©«öŪ░Ģrķg = ŅAįOĢrķgŻ® |
Y |
Y |
|
22 |
Č©ĢrŲ„ T96 CT=PTŻ©«öŪ░Ģrķg = ŅAįOĢrķgŻ® |
Y |
Y |
|
23 |
Č╦┐┌ 0 Įė╩šŽ¹Žó═Ļ│╔ |
Y |
Y |
|
24 |
Č╦┐┌ 1 Įė╩šŽ¹Žó═Ļ│╔ |
N |
Y |
|
25 |
Č╦┐┌ 1 Įė╩šūųĘ¹ |
N |
Y |
|
26 |
Č╦┐┌ 1 ░l╦══Ļ│╔ |
N |
Y |
|
27 |
HSC0 ĘĮŽ“Ė─ūā |
Y |
Y |
|
28 |
HSC0 ═Ō▓┐Å═╬╗ |
Y |
Y |
|
29 |
HSC4 CV=PV |
N |
Y |
|
30 |
HSC4 ĘĮŽ“Ė─ūā |
N |
Y |
|
31 |
HSC4 ═Ō▓┐Å═╬╗ |
N |
Y |
|
32 |
HSC3 CV=PVŻ©«öŪ░ųĄ = ŅAįOųĄŻ® |
Y |
Y |
|
33 |
HSC5 CV=PV |
N |
Y |
|
34 |
PTO2 ├}ø_ėŗöĄ═Ļ│╔ |
N |
Y |
|
35 |
I7.0 ╔Ž╔²čžŻ©ą┼╠¢░ÕŻ® |
N |
Y |
|
36 |
I7.0 Ž┬ĮĄčžŻ©ą┼╠¢░ÕŻ® |
N |
Y |
|
37 |
I7.1 ╔Ž╔²čžŻ©ą┼╠¢░ÕŻ® |
N |
Y |
|
38 |
I7.1 Ž┬ĮĄčžŻ©ą┼╠¢░ÕŻ® |
N |
Y |
|
43 |
HSC5 ĘĮŽ“Ė─ūā |
N |
Y |
|
44 |
HSC5 ═Ō▓┐Å═╬╗ |
N |
Y |
S7-200SMART plcŻ¼╬„ķTūėplcĄ─ųąöÓųĖ┴Ņ
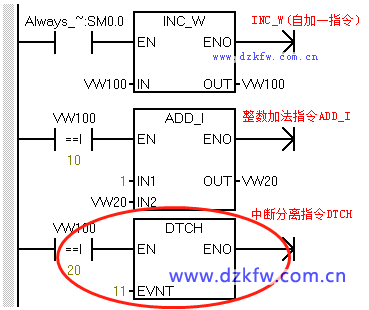
ATCHŻ║ųąöÓ▀BĮėŻ¼▀BĮė─│ųąöÓ╩┬╝■╦∙꬚{ė├Ą─│╠ą“Č╬ĪŻENIŻ║╚½Šųį╩įSųąöÓŻ¼ķ_Ę┼ųąöÓ╠Ä└Ē╣”─▄ĪŻDISIŻ║╚½ŠųĮ¹ų╣ųąöÓŻ¼Į¹ų╣╠Ä└ĒųąöÓĘ■äš│╠ą“Ż¼Ą½ųąöÓ╩┬╝■╚į╚╗Ģ■┼┼ĻĀĄ╚║“ĪŻDTCHŻ║ųąöÓĘųļxŻ¼īóųąöÓ╩┬╝■╠¢┼cųąöÓĘ■äš│╠ą“ų«ķgĄ─ĻP┬ōŪąöÓŻ¼▓óĮ¹ų╣įōųąöÓ╩┬╝■ĪŻRETIŻ║Śl╝■ųąöÓĘĄ╗žŻ¼Ė∙ō■▀ē▌ŗ▓┘ū„Ą─Śl╝■Ż¼Å─ųąöÓĘ■äš│╠ą“ųąĘĄ╗žĪŻCLR_EVNTŻ║ŪÕ┐šųąöÓĻĀ┴ąĪŻ
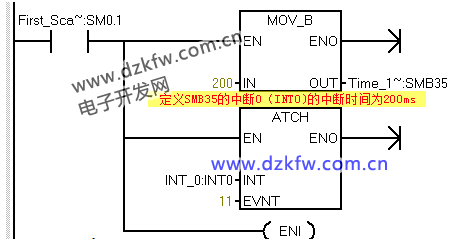
INT╣▄─_▒Ē╩Š▀BĮėŠ▀¾wĄ─ųąöÓ│╠ą“EVNT▒Ē╩ŠųąöÓ╩┬╝■╠¢ENI×ķį╩įSųąöÓųĖ┴ŅĪŻCPUį┌RUN─Ż╩ĮŽ┬Ģr╩ŪĮ¹ų╣ųąöÓ╣”─▄Ą─Ż¼į┌╩╣ė├ųąöÓ│╠ą“Ū░▒žĒÜ╩╣ė├į╩įSķ_ųąöÓųĖ┴Ņ
ųąöÓĘųļxųĖ┴ŅDTCH
ųąöÓĘĄ╗ž RETI
ųąöÓĮ¹ų╣ųĖ┴Ņ DISI

«öųĖ┴Ņł╠ąą║¾Į¹ų╣╦∙ėąųąöÓŻ¼╝┤▒Ń░l╔·ųąöÓ╩┬╝■ę▓▓╗Ģ■ł╠ąąųąöÓ│╠ą“Ż╗ąĶųžą┬ķ_åóį╩įSųąöÓ║¾▓┼┐╔į┘┤╬╩╣ė├ųąöÓ╣”─▄ĪŻųąöÓĮ¹ų╣║═ųąöÓĘųļxėąę╗Č©Ą─ģ^äeŻ¼ųąöÓĘųļx╩ŪöÓķ_─│éĆųąöÓ╩┬╝■Č°ųąöÓĮ¹ų╣╩ŪöÓķ_š¹éĆųąöÓ│╠ą“
1ĪóųąöÓ│╠ą“æ¬Č╠ąĪČ°║åå╬Ż¼ł╠ąąĢrī”Ųõ╦¹╠Ä└ĒįĮČ╠įĮ║├2Īó200SMART ūŅČÓ╩╣ė├128éĆųąöÓ│╠ą“Ż¼ųąöÓ│╠ą“▓╗─▄ŪČ╠ū3ĪóųąöÓ│╠ą“ł╠ąą║¾Ģ■ūįäėĘĄ╗žŻ¼ę▓┐╔į┌ųą═Šė╔▀ē▌ŗ┐žųŲ╩╣ė├ųąöÓĘĄ╗žųĖ┴ŅĘĄ╗ž4ĪóųąöÓ│╠ą“ų╗ąĶę¬║═ųąöÓ╩┬╝■▀BĮėę╗┤╬Ż©╩╣ė├čž├}ø_╗“SM0.1 Ż®Ż╗ČÓéĆųąöÓ╩┬╝■┐╔ęį▀BĮėę╗éĆųąöÓĘ■äš│╠ą“Ż╗ę╗éĆųąöÓ╩┬╝■ų╗─▄▀BĮėę╗éĆųąöÓ│╠ą“ 5ĪóųąöÓ│╠ą“▓╗─▄═©▀^Śl╝■š{ė├Ż¼ų╗ėąė╔ė├æ¶│╠ą“░čųąöÓ│╠ą“├¹ĘQ║═ųąöÓ╩┬╝■┬ōŽĄŲüĒŻ¼▓óŪęąĶę¬į╩įSųąöÓ║¾▓┼─▄▀M╚ļĄ╚┤²ųąöÓ▓óļSĢrł╠ąąĄ─ĀŅæB.
╔±╝ēģR┐éŻ¼╬„ķTūėPLCųąöÓųĖ┴Ņ╝░└²│╠ ATCH║═ENI
m.www84811.com/Article/tixingtu/10187.html
PLSųĖ┴ŅŻ¼ūė│╠ą“║═ųąöÓ│╠ą“ė├Ę©
m.www84811.com/Article/tixingtu/10134.html
╬„ķTūėS7-200smart═©▀^╦▓Ģr┴„┴┐üĒėŗ╦Ń└█ėŗ┴„┴┐Ą─ę╗ĘNĘĮĘ© ųąöÓIN_T0
m.www84811.com/Article/tixingtu/10154.html
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū