
ę╗ĪóįO(sh©©)ėŗ╦╝┬ĘPART 01
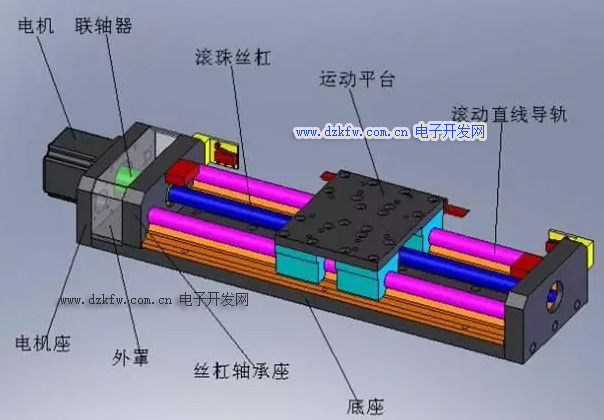
1Īóė├PLC┐žųŲę╗ŠS▀\äėŲĮ┼_īŹ¼F(xi©żn)ļŖÖCĄ─ūįäėš²Ę┤▐D(zhu©Żn)▀\ąą╝░╩ųäėš²Ę┤▐D(zhu©Żn)▀\ąąŻ╗
2Īóę╗ŠS▀\äėŲĮ┼_Ą─ąą│╠ā╔Č╦Ė„ėąę╗ąą│╠ķ_ĻP(gu©Īn)Ż¼ĘųäeČ©┴x×ķš²Ž“Ž▐╬╗║═žō(f©┤)Ž“Ž▐╬╗Ż╗
3Īóį┌ļŖÖCūįäėš²Ę┤▐D(zhu©Żn)▀\ąąŪ░Ż¼ąĶī”ļŖÖC▀M(j©¼n)ąąÅ═(f©┤)╬╗ĪŻÅ═(f©┤)╬╗Ą─▀^│╠╩ŪŻ║åóäėļŖÖC═∙žō(f©┤)Ž“▀\ąąŻ¼▀\ąąų┴žō(f©┤)Ž“Ž▐╬╗║¾Ż¼═∙š²Ž“▀\ąąę╗Č╬ŠÓļxŻ¼īóįō╬╗ų├ū„×ķļŖÖCūįäėš²Ę┤▐D(zhu©Żn)▀\ąąĄ─│§╩╝╬╗ų├Ż╗
4ĪóÅ═(f©┤)╬╗═Ļ│╔║¾Ż¼░┤Ž┬š²▐D(zhu©Żn)░┤ŌoŻ¼ļŖÖC═∙š²Ž“▀\ąąę╗Č╬ŠÓļxŻ©įōŠÓļx═©▀^▀\äė░³Įj(lu©░)ģóöĄ(sh©┤)įO(sh©©)Č©Ż®Ż¼ĄĮ╬╗║¾═Żų╣ĪŻ░┤Ž┬Ę┤▐D(zhu©Żn)░┤ŌoŻ¼ļŖÖC═∙žō(f©┤)Ž“▀\ąąę╗Č╬ŠÓļxŻ¼ĄĮ╬╗║¾═Żų╣Ż╗
5Īó╚ńš²Ę┤▐D(zhu©Żn)▀\ąą▀^│╠ųąŻ¼ė|äėąą│╠ķ_ĻP(gu©Īn)Ż¼ļŖÖC═Żų╣▀\ąąĪŻ┤╦Ģr┐╔═©▀^╩ųäėš²Ę┤▐D(zhu©Żn)░┤Ōo┐žųŲļŖÖC▀\ąąļxķ_Ž▐╬╗ķ_ĻP(gu©Īn)Ż¼╗“░┤Ž┬Å═(f©┤)╬╗░┤Ōoī”ŲĮ┼_ųžą┬Å═(f©┤)╬╗Ż╗
6Īóė|äėąą│╠ķ_ĻP(gu©Īn)║¾Ż¼ąĶųžą┬Å═(f©┤)╬╗▓┼─▄▀M(j©¼n)ąąūįäėš²Ę┤▐D(zhu©Żn)▀\ąą┐žųŲŻ╗
7Īóį┌ļŖÖC▀\ąą▀^│╠ųąŻ¼╚╬║╬Ģr┐╠Š∙┐╔═©▀^Ī░═Żų╣░┤ŌoĪ▒║═Ī░╝▒═Ż░┤ŌoĪ▒┐žųŲŲõ═Żų╣▀\ąąŻ╗
8Īó═Żų╣▀\ąą║¾Ż¼ąĶųžą┬Å═(f©┤)╬╗▓┼─▄▀M(j©¼n)ąąūįäėš²Ę┤▐D(zhu©Żn)▀\ąą┐žųŲŻ╗
9ĪóĪ░Å═(f©┤)╬╗ųĖ╩Š¤¶Ī▒ĪóĪ░▀\ąąųĖ╩Š¤¶Ī▒║═Ī░═Żų╣ųĖ╩Š¤¶Ī▒ė├üĒųĖ╩Šę╗ŠSŲĮ┼_Ą─▀\ąąĀŅæB(t©żi)ĪŻ
Č■ĪóÖCąĄ▒Š¾wPART 02
╚²Īóė▓╝■ļŖ┬ĘPART 03
S7-200 CPU╠ß╣®ā╔éĆĖ▀╦┘├}ø_▌ö│÷³cŻ©Q0.0║═Q0.1Ż®,┐╔ęįĘųäe╣żū„į┌PTO(├}ø_┤«▌ö│÷Ż®║═PWMŻ©├}īÆš{(di©żo)ųŲŻ®ĀŅæB(t©żi)Ž┬ĪŻ╩╣ė├PTO╗“PWM┐╔ęįīŹ¼F(xi©żn)╦┘Č╚Īó╬╗ų├Ą─ķ_Łh(hu©ón)▀\äė┐žųŲĪŻ
PTO╣”─▄┐╔ęį▌ö│÷ę╗┤«├}ø_Ż¼ė├æ¶┐╔ęį┐žųŲ├}ø_Ą─ų▄Ų┌Ż©Ņl┬╩Ż®║═éĆöĄ(sh©┤)ĪŻPWM╣”─▄┐╔ęį▀B└m(x©┤)▌ö│÷ę╗┤«š╝┐š▒╚┐╔š{(di©żo)Ą─├}ø_Ż¼ė├æ¶┐╔ęį┐žųŲ├}ø_Ą─ų▄Ų┌║═├}īÆŻ©š╝┐š▒╚Ż®ĪŻ
Ė▀╦┘├}ø_▌ö│÷³c║═Ųš═©öĄ(sh©┤)ūų┴┐▌ö│÷³c╣▓ė├▌ö│÷ė│Ž±Q0.0║═Q0.1ĪŻ«ö(d©Īng)į┌Q0.0║═Q0.1╔Ž╝ż╗ŅPTO╗“PWM╣”─▄ĢrŻ¼PTO/PWM░l(f©Ī)╔·Ų„ī”▌ö│÷ōĒėą┐žųŲÖÓ(qu©ón)Ż¼▌ö│÷▓©ą╬▓╗╩▄Ųõ╦¹ė░ĒæĪŻ
ų╗ėąŠ¦¾w╣▄▌ö│÷ŅÉą═Ą─CPU─▄ē“ų¦│ųĖ▀╦┘├}ø_▌ö│÷╣”─▄ĪŻ
╦─Īó▀\äė░³Įj(lu©░)PART 04
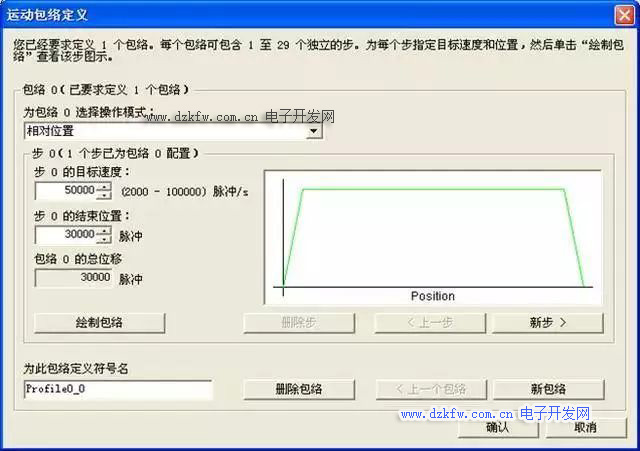
░³Įj(lu©░)Ż©ProfileŻ®╩Ūę╗éĆŅA(y©┤)Ž╚Č©┴xĄ─ęį╬╗ų├×ķÖMū°ś╦(bi©Īo)Ż¼ęį╦┘Č╚×ķ┐vū°ś╦(bi©Īo)Ą─Ū·ŠĆŻ¼░³Įj(lu©░)╩Ū▀\äėĄ─łDą╬├Ķ╩÷ĪŻ
ę╗éĆ░³Įj(lu©░)ė╔ČÓČ╬ĮM│╔Ż¼├┐ę╗Č╬░³║¼ę╗éĆ▀_(d©ó)ĄĮ─┐ś╦(bi©Īo)╦┘Č╚Ą─╝ė£p╦┘▀^│╠Ż¼║═ęį─┐ś╦(bi©Īo)╦┘Č╚ä“╦┘▀\ąąĄ─ę╗┤«ųĖČ©öĄ(sh©┤)┴┐Ą─├}ø_ĪŻ╚ń╣¹╩Ūå╬Č╬▀\äė┐žųŲ╗“š▀╩ŪČÓČ╬▀\äė┐žųŲĄ─ūŅ║¾ę╗Č╬Ż¼▀Ćæ¬(y©®ng)įō░³└©ę╗éĆė╔─┐ś╦(bi©Īo)╦┘Č╚ĄĮ═Żų╣Ą─£p╦┘▀^│╠ĪŻ
PTOų„ę¬═©▀^░³Įj(lu©░)üĒīŹ¼F(xi©żn)╬╗ų├┐žųŲĪŻ╬╗ų├┐žųŲŽļĄĮ═©▀^ģóöĄ(sh©┤)įO(sh©©)ų├üĒäō(chu©żng)Į©░³Įj(lu©░)Ż¼▓óė├łDą╬ĘĮ╩Į’@╩Š░³Įj(lu©░)Ū·ŠĆŻ¼ūįäė╔·│╔╬╗ų├┐žųŲė├Ą─ūė│╠ą“ĪŻ
╬ÕĪó▀\äė░³Įj(lu©░)įO(sh©©)Č©▓Į¾EPART 05
į┌ķ_╩╝ŠÄīæ│╠ą“Ū░Ż¼╩ūŽ╚įO(sh©©)Č©▀\äė░³Įj(lu©░)Ż¼▓Į¾E╚ńŽ┬Ż║
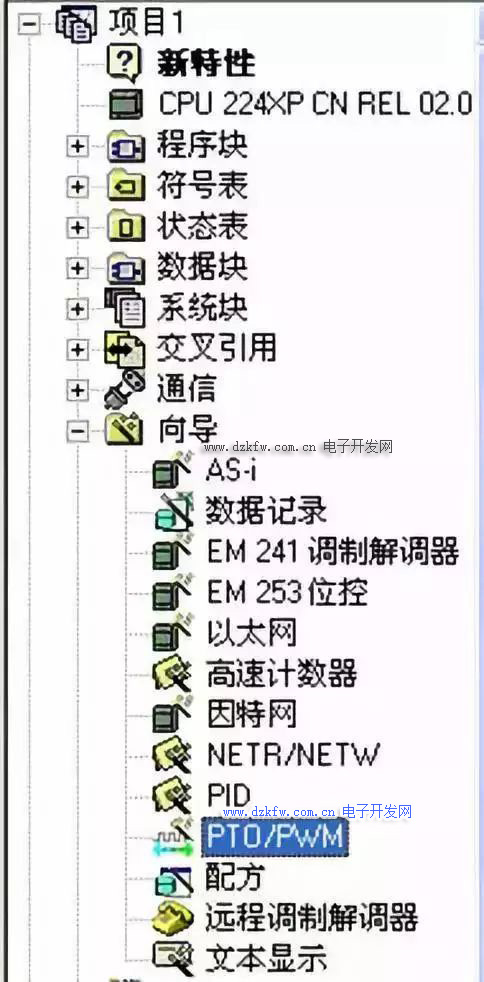
Ż©1Ż®ļpō¶ū¾łD╦∙╩ŠĪ░Ž“?q©▒)¦Ī¬PTO/PWMĪ▒Ż¼│÷¼F(xi©żn)Ī░├}ø_▌ö│÷Ž“?q©▒)¦Ī▒┤░┐┌Ī?/P>
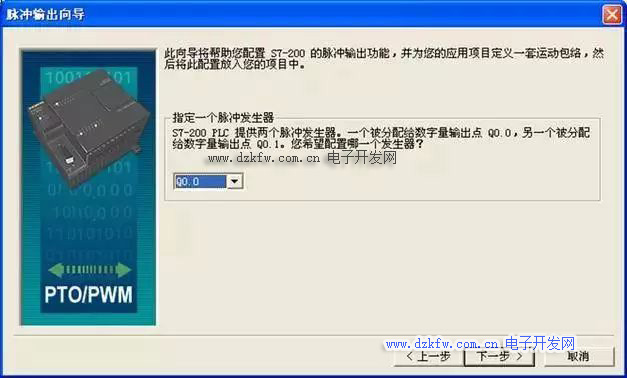
Ż©2Ż®▀xō±Q0.0Ż¼å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒ĪŻ
Ż©3Ż®▀xō±Ī░ŠĆąį├}ø_┤«▌ö│÷Ż©PTOŻ®Ī▒Ż¼å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒ĪŻ
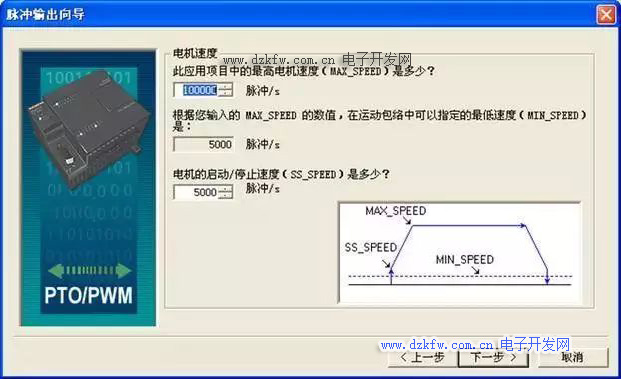
Ż©4Ż®įO(sh©©)ų├ĒŚ─┐ųąæ¬(y©®ng)ė├Ą─ļŖÖCūŅĖ▀╦┘Č╚ĪóūŅĄ═╦┘Č╚║═ļŖÖCåóäė/═Żų╣╦┘Č╚ĪŻ
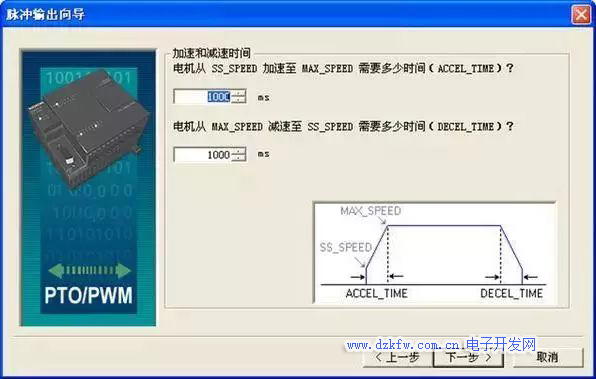
Ż©5Ż®å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒Ż¼įO(sh©©)ų├╝ė£p╦┘ĢrķgĪŻ
Ż©6Ż®å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒ĪŻ
Ż©7Ż®³cō¶Ī░ą┬░³Įj(lu©░)Ī▒Ż¼▀xō±Ī░╩ŪĪ▒ĪŻ
Ż©8Ż®łD27╗ę╔½▓┐Ęų╝ż╗ŅŻ¼į┌Ųõųą▀xō±Ī░ŽÓī”╬╗ų├Ī▒Ż¼įO(sh©©)ų├║├ģóöĄ(sh©┤)Ż¼Ųõųą▓Į0Ą──┐ś╦(bi©Īo)╬╗ų├▓╗ę¬įO(sh©©)ų├╠½ąĪŻ¼ąĶ┤¾ė┌╝ė£p╦┘├}ø_öĄ(sh©┤)ų«║═ĪŻ
Ż©9Ż®å╬ō¶Ī░┤_šJ(r©©n)Ī▒ĪŻ
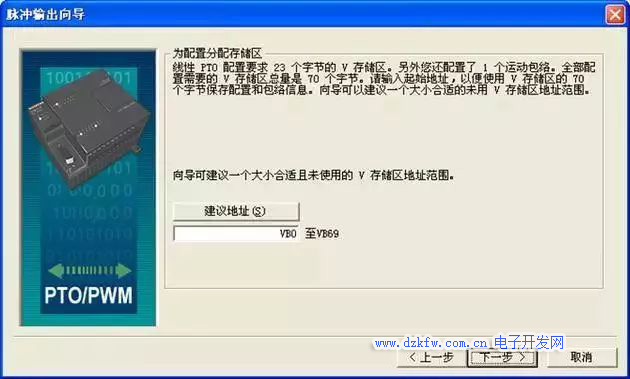
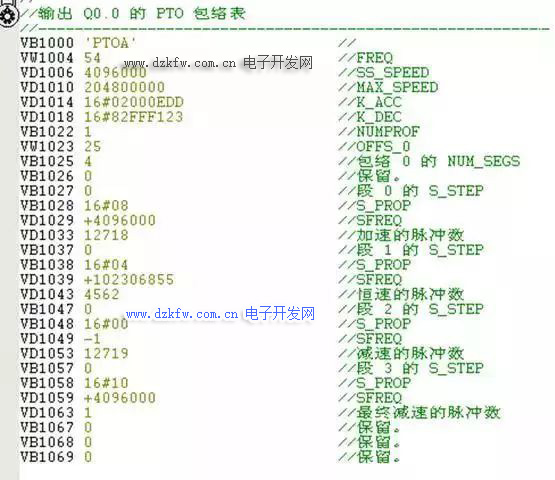
Ż©10Ż®īóģóöĄ(sh©┤)Ī▒VB0Ī▒Ė³Ė─×ķĪ░VB1000Ī▒Ż¼ąĶūóęŌŻ¼▓╗ę¬į┌│╠ą“ųąį┘ųžÅ═(f©┤)Č©┴xĪ░VB1000Ī¬VB1069Ī▒Ż╗å╬ō¶Ī░Ž┬ę╗▓ĮĪ▒ĪŻ
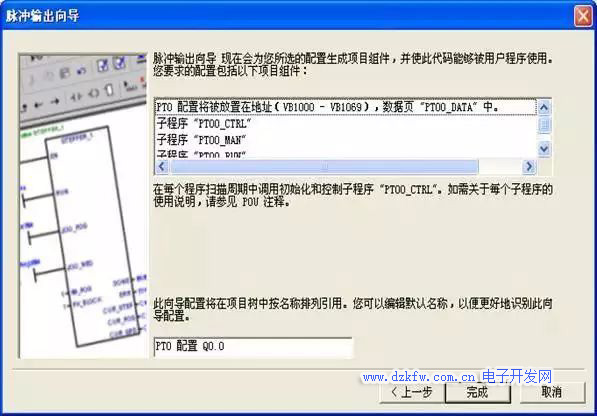
Ż©11Ż®å╬ō¶Ī░═Ļ│╔Ī▒Ż¼į┌ÅŚ│÷Ą─ī”įÆ┐“ųą▀xō±Ī░╩ŪĪ▒ĪŻ
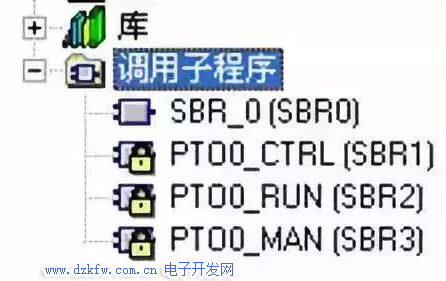
Ż©12Ż®▀\äė░³Įj(lu©░)įO(sh©©)ų├═Ļ│╔ĪŻį┌š{(di©żo)ė├ūė│╠ą“ųą│÷¼F(xi©żn)Q0.0ī”æ¬(y©®ng)Ą─╬╗┐žūė│╠ą“ĪŻ
┴∙ĪóPLC│╠ą“PART 06
1Īó╔ŽļŖ│§╩╝╗»
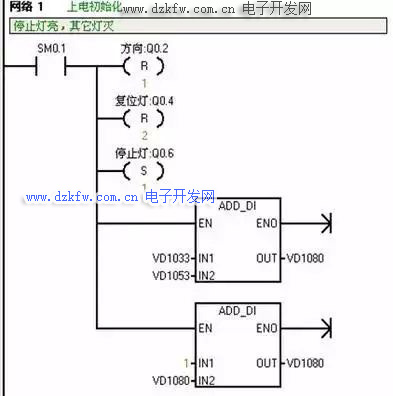
SM0.1Ż║╩ū┤╬Æ▀├Ķų▄Ų┌Ģrįō╬╗┤“ķ_Ż¼ė├═Š╩Ūš{(di©żo)ė├│§╩╝╗»ūė│╠ą“ĪŻ
2ĪóļŖÖC┐žųŲūė│╠ą“║═│§╩╝╗»
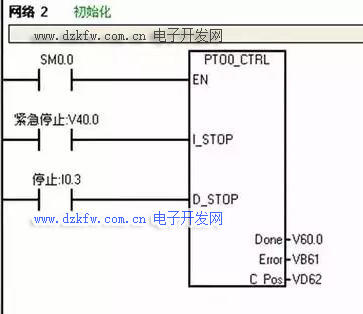
PTO0_CTRLį┌│╠ą“ųąų╗╩╣ė├ę╗┤╬Ż¼▓óŪęį┌├┐┤╬Æ▀├ĶĢrĄ├ĄĮł╠(zh©¬)ąą,╦∙ęį╩╣ė├SM0.0ū„×ķENĄ─▌ö╚ļĪŻ
ENŻ║╩╣─▄Č╦Ż¼ė├SM0.0▀BĮėŻ¼▒Ż│ų│Ż═©Ż╗
I_STOPŻ║ėąą¦ĢrļŖÖC┴ó╝┤═Żų╣Ż╗
D_STOPŻ║ėąą¦ĢrļŖÖC£p╦┘═Żų╣Ż╗
DoneŻ║═Ļ│╔ś╦(bi©Īo)ųŠĪŻ×ķĪ░1Ī▒Ģr▒Ē├„╔Žę╗ųĖ┴Ņł╠(zh©¬)ąą═Ļ│╔Ż╗
ErrorŻ║’@╩ŠÕeš`┤·┤aŻ¼Ī░0Ī▒▒Ē╩Š¤oÕeš`Ż╗
C_PosŻ║HSCėŗöĄ(sh©┤)Ų„╣”─▄ķ_åóĢrŻ¼▒Ē╩Š▀\ąą├}ø_öĄ(sh©┤)Ż¼Ę±ät×ķ0ĪŻ
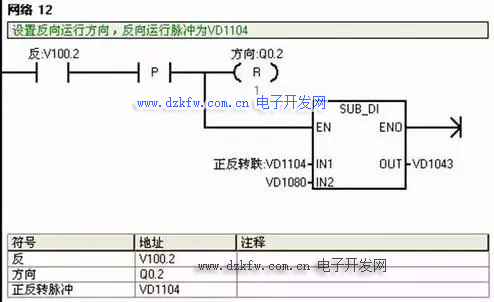
3ĪóÅ═(f©┤)╬╗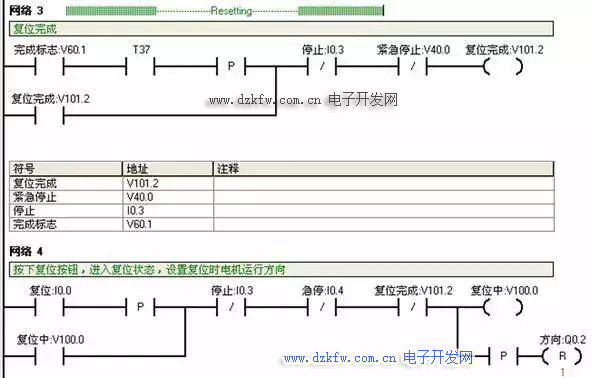
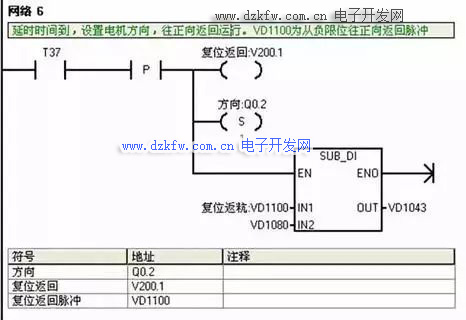
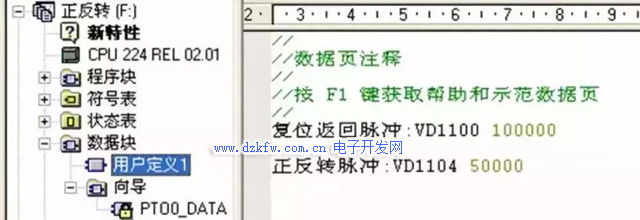
VD1100Ż║Å═(f©┤)╬╗ĘĄ╗ž├}ø_öĄ(sh©┤)Ż¼į┌öĄ(sh©┤)ō■(j©┤)ēKĄ─Ī░ė├æ¶Č©┴x1Ī▒▀M(j©¼n)ąąįO(sh©©)ų├ĪŻĖ∙ō■(j©┤)ļŖÖCĄ─£p╦┘▒╚║═“ī(q©▒)äėŲ„Ą─╝Ü(x©¼)Ęųęį╝░ļŖÖCąą│╠įO(sh©©)ų├ĪŻ
VD1043Ż║▀\ąą░³Įj(lu©░)║Ń╦┘Č╬├}ø_öĄ(sh©┤)Ż╗VD1100ŻŁVD1080= VD1043ĪŻ
4Īóš²▐D(zhu©Żn)
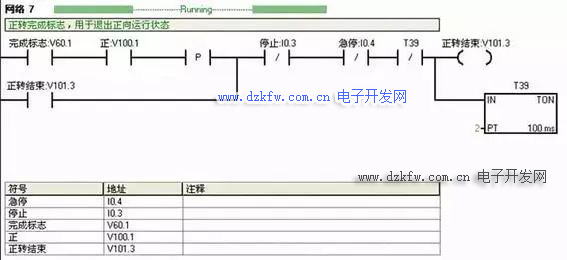
VD60.1Ż║▀\äė░³Įj(lu©░)▀\ąą═Ļ│╔ś╦(bi©Īo)ųŠŻ¼PTO0_CTRLųąĄ─Ī░DoneĪ▒ģóöĄ(sh©┤)Ż╗v100.1Ż║š²▐D(zhu©Żn)▀\ąąĀŅæB(t©żi)Ż╗v101.3Ż║š²▐D(zhu©Żn)ĮY(ji©”)╩°Ż╗
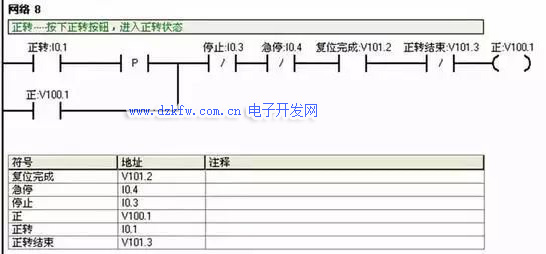
I0.1Ż║š²▐D(zhu©Żn)░┤ŌoŻ╗
V100.1Ż║š²▐D(zhu©Żn)▀\ąąĀŅæB(t©żi)Ż╗V101.2Ż║Å═(f©┤)╬╗═Ļ│╔ś╦(bi©Īo)ųŠĪŻš²Ę┤▐D(zhu©Żn)ūįäė▀\ąąŪ░▒žĒÜÅ═(f©┤)╬╗═Ļ│╔Ż╗
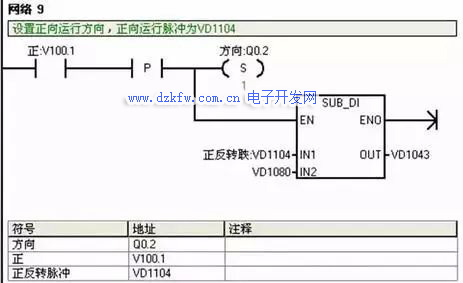
Q0.2Ż║ļŖÖCĘĮŽ“Ż╗
VD1104Ż║š²Ę┤▐D(zhu©Żn)├}ø_öĄ(sh©┤)Ż¼═¼VD1100ģóöĄ(sh©┤)ę╗śėŻ¼ į┌Ī░öĄ(sh©┤)ō■(j©┤)ēKĪ▒Ą─Ī░ė├æ¶Č©┴x1Ī▒ųąįO(sh©©)ų├Ż«VD1104ŻŁVD1080= VD1043ĪŻ
5ĪóĘ┤▐D(zhu©Żn)
VD60.1Ż║▀\äė░³Įj(lu©░)▀\ąą═Ļ│╔ś╦(bi©Īo)ųŠŻ¼PTO0_CTRLųąĄ─Ī░DoneĪ▒ģóöĄ(sh©┤)Ż╗v100.2Ż║Ę┤▐D(zhu©Żn)▀\ąąĀŅæB(t©żi)Ż╗v101.4Ż║Ę┤▐D(zhu©Żn)ĮY(ji©”)╩°Ż╗
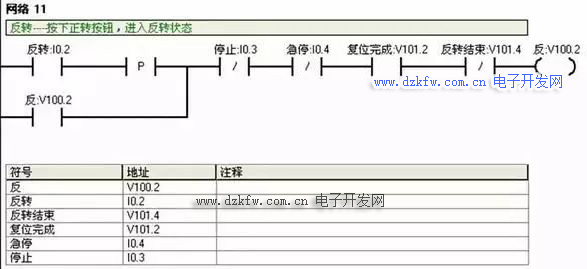
I0.2Ż║Ę┤▐D(zhu©Żn)░┤ŌoŻ╗V100.2Ż║Ę┤▐D(zhu©Żn)▀\ąąĀŅæB(t©żi)Ż╗V101.2Ż║Å═(f©┤)╬╗═Ļ│╔ś╦(bi©Īo)ųŠĪŻš²Ę┤▐D(zhu©Żn)ūįäė▀\ąąŪ░▒žĒÜÅ═(f©┤)╬╗═Ļ│╔Ż╗
Q0.2Ż║ļŖÖCĘĮŽ“Ż╗
VD1104Ż║š²Ę┤▐D(zhu©Żn)├}ø_öĄ(sh©┤)Ż¼═¼VD1100ģóöĄ(sh©┤)ę╗śėŻ¼į┌Ī░öĄ(sh©┤)ō■(j©┤)ēKĪ▒Ą─Ī░ė├æ¶Č©┴x1Ī▒ųąįO(sh©©)ų├ĪŻVD1104ŻŁVD1080= VD1043ĪŻ
6Īó╩ųäėš²▐D(zhu©Żn)
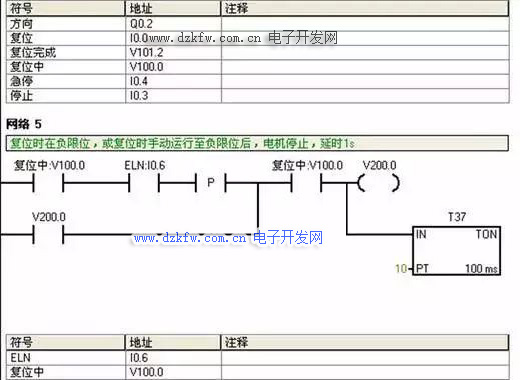
╩ųäėš²▐D(zhu©Żn)╩Ūī”ļŖÖCĄ─³cäė┐žųŲŻ¼ąĶę¬ę╗ų▒░┤ūĪ░┤ŌoŻ¼ļŖÖC▓┼─▄▀\ąąĪŻ▀\ąąų┴š²Ž▐╬╗║¾Ż¼╝┤╩╣░┤ūĪ░┤Ōoę▓▓╗─▄▀\ąąŻ¼ų╗─▄Ę┤Ž“▀\ąąĪŻ7Īó╩ųäėĘ┤▐D(zhu©Żn)
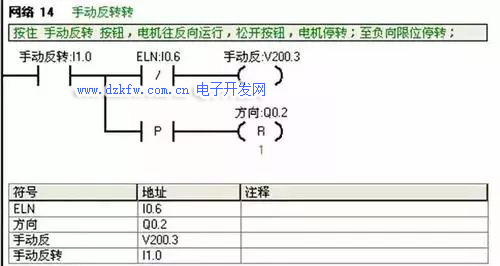
╩ųäėĘ┤▐D(zhu©Żn)╩Ūī”ļŖÖCĄ─³cäė┐žųŲŻ¼ąĶę¬ę╗ų▒░┤ūĪ░┤ŌoŻ¼ļŖÖC▓┼─▄▀\ąąĪŻ▀\ąąų┴žō(f©┤)Ž▐╬╗║¾Ż¼╝┤╩╣░┤ūĪ░┤Ōoę▓▓╗─▄▀\ąąŻ¼ų╗─▄š²Ž“▀\ąąĪŻ8ĪóŠo╝▒═Żų╣
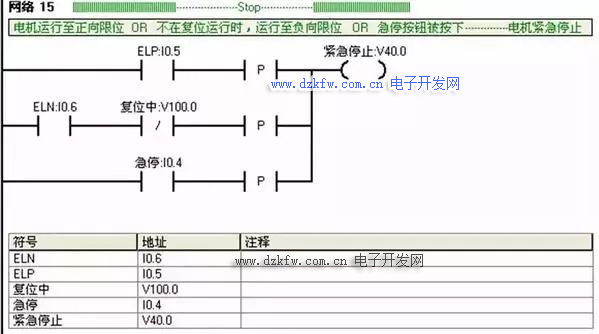
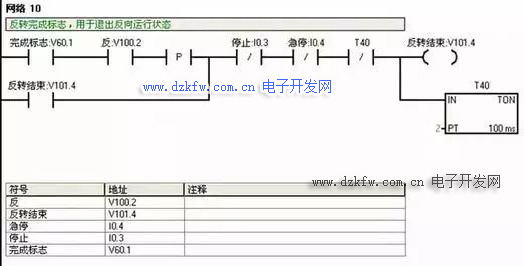
Šo╝▒═Żų╣Ż║▀\ąąų┴š²žō(f©┤)Ž▐╬╗ĢrŻ¼ī”ŽĄĮy(t©»ng)Ą─▒Żūo(h©┤)▓▀┬įĪŻ╚╬║╬ŪķørŽ┬Ż¼░┤Ž┬Šo╝▒═Żų╣░┤ŌoŻ¼╩╣ŽĄĮy(t©»ng)Šo╝▒═Żų╣ĪŻ
9Īó▌ö│÷
(1)Īó░³Įj(lu©░)▀\ąą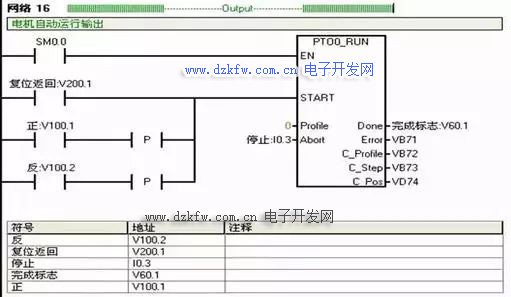
ENŻ║╩╣─▄Č╦Ż¼ė├SM0.0µ£Įė▒Ē╩Š▒Ż│ų│Ż═©Ż╗
STARTŻ║ģóöĄ(sh©┤)ķ_åóĢrŻ¼ł╠(zh©¬)ąą▀\äė░³Įj(lu©░)Ż¼×ķ┤_▒Ż├³┴Ņų╗░l(f©Ī)╦═ę╗┤╬Ż¼╩╣ė├╔Ž╔²čžą┼╠¢Ż╗
ProfileŻ║įO(sh©©)Č©Ą─▀\äė░³Įj(lu©░)ŠÄ╠¢Ż╗
AbortŻ║╬╗┐ž─ŻēK═Żų╣ģóöĄ(sh©┤)ĪŻķ_åó║¾═Żų╣▀\ąą«ö(d©Īng)Ū░░³Įj(lu©░)▓ó£p╦┘═Żų╣Ż╗
DoneŻ║═Ļ│╔ś╦(bi©Īo)ųŠĪŻ─ŻēK═Ļ│╔įōūė│╠ą“ĢrŻ¼┤╦ģóöĄ(sh©┤)×ķĪ░1Ī▒Ż╗
ErrorŻ║Õeš`┤·┤aŻ¼×ķĪ░0Ī▒▒Ē╩Š¤oÕeš`Ż╗
C_ProfileŻ║░³║¼╬╗┐ž─ŻēK«ö(d©Īng)Ū░ł╠(zh©¬)ąąĄ─▌å└¬Ż╗
C_StepŻ║─┐Ū░š²į┌ł╠(zh©¬)ąąĄ─▌å└¬▓Į¾EŻ╗
C_PosŻ║╚ń╣¹PTOŽ“?q©▒)¦Ą─HSCėŗöĄ(sh©┤)Ų„╣”─▄ęčåóė├Ż¼C_PosģóöĄ(sh©┤)░³║¼ė├├}ø_öĄ(sh©┤)─┐▒Ē╩ŠĄ──ŻēKŻ╗ʱät┤╦öĄ(sh©┤)ųĄ╩╝ĮK ×ķ0ĪŻ
(2)Īó³cäė▀\ąą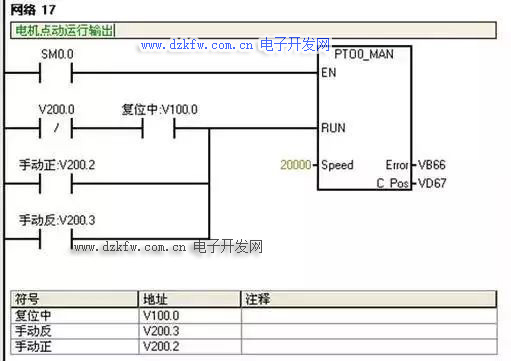
ENŻ║╩╣─▄Č╦Ż¼SM0.0▒Ż│ų│Ż═©Ż╗
RUNŻ║åóė├įōģóöĄ(sh©┤)╝ė╦┘ų┴įO(sh©©)Č©╦┘Č╚▀\ąąŻ¼═Żė├įōģóöĄ(sh©┤)ļŖÖC£p╦┘═Żų╣Ż╗
SpeedŻ║įO(sh©©)Č©╩ųäė▀\ąąĄ─ūŅĖ▀╦┘Č╚Ż╗
ErrorŻ║▒Šūė│╠ą“Ą─Õeš`┤·┤aŻ¼Ī░0Ī▒▒Ē╩Š¤oÕeš`Ż╗
C_PosŻ║╚ń╣¹PTOŽ“?q©▒)¦Ą─HSCėŗöĄ(sh©┤)Ų„╣”─▄ęčåóė├Ż¼C_PosģóöĄ(sh©┤)░³║¼ė├├}ø_öĄ(sh©┤)─┐▒Ē╩ŠĄ──ŻēKŻ╗ʱät┤╦öĄ(sh©┤)ųĄ╩╝ĮK×ķ┴ŃĪŻ
(3)ĪóųĖ╩Š¤¶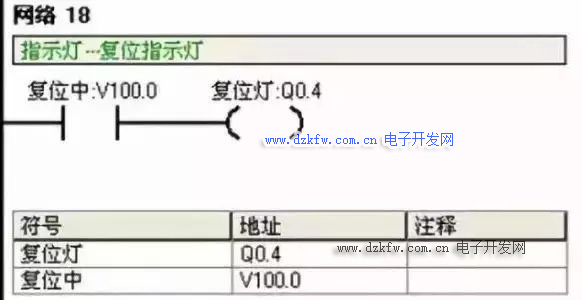
Å═(f©┤)╬╗ĀŅæB(t©żi)Ž┬Ż¼Å═(f©┤)╬╗ųĖ╩Š¤¶┴┴ĪŻ
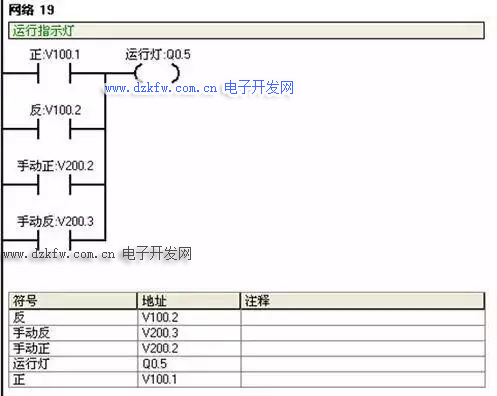
š²Ę┤▐D(zhu©Żn)▀\ąąĢrŻ¼▀\ąąųĖ╩Š¤¶┴┴ĪŻ
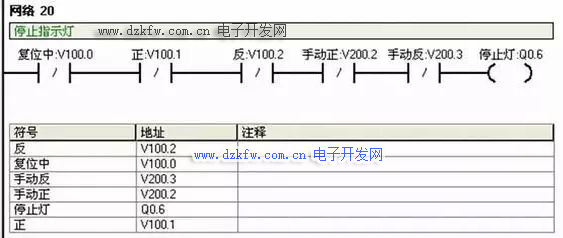
▓╗╠Äė┌Å═(f©┤)╬╗╗“▀\ąąĀŅæB(t©żi)ĢrŻ¼═Żų╣¤¶┴┴ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū